Mars Exploration Rover

Mars Exploration Rover, skrótowiec: MER – zakończona podwójna amerykańska misja międzyplanetarna realizowana przez NASA w ramach programu naukowego Mars Exploration Program.
Opis misji
[edytuj | edytuj kod]Na misję MER składały się dwa automatyczne roboty – łaziki o nazwach Spirit (Duch) i Opportunity (Sposobność). Łaziki przemieszczały się po planecie, badając ją głównie pod kątem geologicznym. Celem misji było poznanie historii geologicznej i klimatycznej Marsa. Pozwoliło to na stwierdzenie, czy na Marsie występuje woda, czy istniały tam kiedykolwiek warunki umożliwiające powstanie życia. Misja MER miała również za zadanie zebrać dane przydatne w planowaniu przyszłych misji załogowych na Marsa. Szefem projektu był Peter Theisinger z Jet Propulsion Laboratory oraz Steven Squyres, profesor astronomii na Uniwersytecie Cornell.
Projekt misji wykonało i realizowało Jet Propulsion Laboratory.
Miejsca lądowania dla sond zostały wytypowane na podstawie danych zebranych przez sondy Mars Global Surveyor i 2001 Mars Odyssey. Lądowisko łazika Spirit to krater Gusiew, w którym być może kiedyś istniało jezioro. Drugie z lądowisk to Meridiani Planum, gdzie obecność hematytu sugeruje dawną obecność wody. Znajduje się on po przeciwnej stronie planety niż krater Gusiew.
Łaziki Spirit i Opportunity zostały wysłane w kierunku Czerwonej Planety, odpowiednio, 10 czerwca (17:58:46,773 UTC) i 8 lipca (03:18:15,170 UTC) 2003 roku, przy użyciu rakiet Delta 2-7925. Początkowe koszty wyniosły 820 mln dolarów, wliczając w to konstrukcję obu pojazdów, zakup rakiet nośnych oraz 90 dni pracy na Marsie w ramach pierwszego etapu misji.

MER-A (MER-2) „Spirit” osiadł na Marsie w dniu 4 stycznia 2004 roku, o godz. 4:35 UTC, tylko 10 kilometrów dalej od planowanego miejsca. Pozycja lądowiska to 14,5718° S (planowo 14,59° S), 175,4785° E (planowo 175,3° E, współrzędnych marsjańskich. Dwa dni później kierownictwo misji nadało nazwę miejscu lądowania sondy – Columbia Memorial Station – na cześć poległej załogi misji STS-107 wahadłowca Columbia.
MER-B (MER-1) „Opportunity” wylądował na Czerwonej Planecie w dniu 25 stycznia 2004 roku, o godz. 5:05 UTC, 24 kilometry od planowanego miejsca lądowania. Trzy dni później miejsce lądowania otrzymało nazwę Challenger Memorial Station, na cześć poległej załogi misji STS-51L wahadłowca Challenger.
Podstawowe cele misji zakładały, że roboty będą pracowały 90 dni (taka długość pracy była gwarantowana przez konstruktorów) i przejadą w tym czasie dystans około 1 km. Oba założenia zostały przekroczone wielokrotnie. Łaziki przejechały łącznie około 53 kilometrów (Spirit: 7,73 km przez cały czas trwania misji; Opportunity: 45,16 km przez cały czas trwania misji) i spędziły na powierzchni Marsa łącznie ponad 5300 marsjańskich dni. Misja łazika Opportunity zakończyła się 13 lutego 2019 roku, po ostatniej, nieudanej próbie komunikacji z łazikiem[1].
Istotnym osiągnięciem łazika Spirit był wjazd na wzgórze Husband Hill dnia 21 sierpnia 2005 r. Podczas jazdy uległo awarii jedno z sześciu kół, spowodowało to ograniczenie jego możliwości jedynie do badania otaczających skał. Później przestało działać kolejne koło, unieruchamiając pojazd. Łazik Spirit przetrwał na powierzchni planety trzy zimy (1 rok marsjański odpowiada ok. 2,1 roku ziemskiego). W marcu 2010 roku, na początku czwartej zimy, przeszedł w stan hibernacji. Ostatnia, nieudana próba komunikacji z łazikiem miała miejsce 25 maja 2011, następnie NASA ogłosiła zakończenie misji[2].
Konstrukcja sond
[edytuj | edytuj kod]
Sondy MER-A i MER-B miały za zadanie dostarczyć bliźniacze roboty, Spirit i Opportunity, na powierzchnię Marsa. Cała sonda ważyła ok. 1063 kg (w tym: łazik – 185 kg; lądownik – 348 kg; osłona tylna ze spadochronem – 209 kg; osłona termiczna – 78 kg; człon rejsowy – 193 kg; paliwo – 50 kg). Sonda miała 165 cm wysokości i 265 cm średnicy. W czasie podróży do powierzchni planety była stabilizowana obrotowo (2 obroty/min). Zasilanie zapewniały ogniwa słoneczne o mocy, w pobliżu Ziemi 600 W (w pobliżu Marsa – 300 W).
Podczas lądowania wykorzystano możliwość hamowania aerodynamicznego, do wstępnej redukcji prędkości. Po wejściu w atmosferę lądowniki rozłożyły spadochron oraz użyły rakiet hamujących. W końcowej fazie, amortyzację zapewniły nadmuchiwane poduszki.
Konstrukcja łazików
[edytuj | edytuj kod]

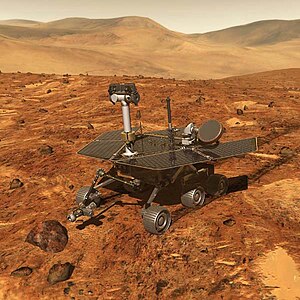
Oba łaziki powstały przy współpracy międzynarodowej NASA głównie z Niemcami i Danią. Pojazd miał masę 185 kg, był zasilany z dwóch baterii litowych o pojemności 8Ah każda, ładowanych ogniwami słonecznymi (maks. 410 Wh). Poruszał się dzięki trzem parom kół. Każde koło miało niezależne zawieszenie i napęd. Przednia i tylna para kół była skrętna, a każde z kół skręcało się niezależnie. Średnia prędkość robota poruszającego się po płaskim terenie to 1 cm/s (maks. 5 cm/s). Ruch robotów odbywał się w sposób nieciągły – po każdych 10 sekundach jazdy, były one zatrzymywane na czas oceny ukształtowania terenu i planowania kolejnych 10 sekund ruchu. Łazik mógł pokonywać wzniesienia do 45°, ale jednocześnie był zaprogramowany tak, aby unikać wzniesień o stromości większej niż 30°. W celach ochrony przed wpływami klimatycznymi Marsa, pojazdy były pomalowane złotą farbą (bardzo dobrze odbijającą światło) i pokryte specjalnym żelem. Temperatura wnętrza robotów była stabilizowana poprzez urządzenia chłodzące (używane za dnia) i ogrzewające (włączane na noc).
Komunikacja z Ziemią odbywała się przy pomocy kierunkowej anteny wysokiego i niskiego zysku, a komunikacja z orbitującymi statkami Mars Global Surveyor i 2001 Mars Odyssey przy użyciu anteny UHF. Dwie ostatnie sondy służyły jako przekaźniki – odbierały dane naukowe z sond i przesyłały je na Ziemie znacznie wydajniej niż mogły to robić same łaziki. Roboty były w bardzo dużym stopniu autonomiczne. Na pokładzie każdego znajdował się pokładowy komputer obsługujący całe wyposażenie i decydujący o działaniu pojazdu. Komputer posiadał 128 MB pamięci RAM (i 256 MB pamięci Flash) oraz 32-bitowy procesor Rad 6000 (odporniejszy na promieniowanie procesor PowerPC o mocy obliczeniowej 20 MIPS).
Wyposażenie
[edytuj | edytuj kod]- PanCam (Panoramic Camera – kamera panoramiczna) – dwie sprzężone kamery stereoskopowe – określanie mineralogii, tekstury i struktury terenu. Wykonywanie przestrzennych obrazów powierzchni Marsa z perspektywy zbliżonej do ludzkiej
- MI (Microscopic Imager) – przyrząd obrazowania mikroskopowego – wykonywanie zdjęć o wysokiej rozdzielczości skał i gleby
- Mini-TES (Miniature Thermal Emission Spectrometer) – miniaturowy spektrometr emisyjny podczerwieni – identyfikacja składu skał i gleby oraz wykonywanie profili temperaturowych atmosfery
- MB – spektrometr Mössbauera MIMOS II – badanie składu skał zawierających związki żelaza
- APXS (Alpha Particle X-Ray Spectrometer) – spektrometr rentgenowski cząstek alfa – badanie obfitości pierwiastków w skałach i glebie
- RAT (Rock Abrasion Tool) – narzędzie ścierające skały w celu zbadania ich wnętrza
- Magnet Array – pułapki magnetyczne do łapania pyłu ferromagnetycznego – chwytanie cząstek pyłu i skał startych przez RAT w celu zbadania ich przez spektrometry APXS i MS
- HazCam (Hazard Avoidance Camera) – cztery kamery dedykowane unikaniu niebezpieczeństw
- NavCam (Navigation Camera) – dwie kamery służące do nawigacji
Przyrządy PanCam, NavCam i Mini-TES znajdują się na 1,5-metrowym wysięgniku. Przyrządy APXS, MI, MB i RAT umieszczono na końcu ruchomego wysięgnika o kilku stopniach swobody, dzięki czemu pozycjonowanie tych przyrządów jest mniej zależne od położenia łazika.
Przypisy
[edytuj | edytuj kod]- ↑ Sam Whitfield: RIP, Oppy the Mars rover. Your 15-year scientific road trip was epic. „Los Angeles Times”, 14 lutego 2019. [dostęp 2019-02-16]. (ang.).
- ↑ End of the Road for Spirit Rover
Linki zewnętrzne
[edytuj | edytuj kod]- Strona projektu NASA
- Zdjęcia NASA
- Strona serwisu PBS poświęcona misjom marsjańskim
- Strona Uniwersytetu Cornell poświęcona projektowi