Envolvente (matemáticas)
En geometría, una envolvente de una familia de curvas en el plano es una curva que es tangente a cada miembro de la familia en algún punto, y estos puntos de tangencia juntos forman la envolvente completa. Clásicamente, un punto en la envolvente se puede considerar como la intersección de dos curvas "infinitesimalmente adyacentes", es decir, el límite de la intersección de dos curvas cuya separación tiende a cero. Esta idea se puede generalizar a una envolvente de superficies en el espacio, y así sucesivamente a dimensiones más altas.
Para poseer una envolvente, los miembros individuales de la familia deben ser curvas diferenciables, ya que de lo contrario el concepto de tangencia no se aplica, y tiene que haber una transición suave a través de sus miembros. Pero incluso si se cumplen estas condiciones, una familia determinada puede no tener una envolvente. Un ejemplo simple de este caso es una familia de circunferencias concéntricas de radio creciente.
Envolvente de una familia de curvas
[editar]Considérese que cada curva Ct de una familia es la solución de una ecuación ft (x, y) = 0 (véase curva implícita), donde t es un parámetro. Por otro lado, se tiene que F (t, x, y) = ft (x, y); y se asume que F es diferenciable.
La envolvente de la familia Ct se define entonces como el conjunto de puntos (x, y) para el que, simultáneamente,
para algún valor de t, donde es la derivada parcial de F con respecto a t.[1]
Si t y u, con t ≠ u, son dos valores del parámetro, entonces la intersección de las curvas Ct y Cu viene dada por
o equivalentemente,
Haciendo u → t se obtiene la definición anterior.
Un caso especial importante es cuando F (t, x, y) es un polinomio en t. Esto incluye, por eliminación de denominadores, el caso en el que F (t, x, y) es una función racional en t. En este caso, la definición equivale a t siendo una raíz doble de F (t, x, y), por lo que la ecuación de la envolvente se puede encontrar al establecer la condición de que el discriminante de F sea 0 (porque la definición exige que F = 0 en algún t y la primera derivada = 0, es decir, que su valor sea 0 implica un mínimo o un máximo de la función en ese t).
Por ejemplo, haciendo que Ct sea la línea cuyas intersecciones x e y son t y 11-t, se obtiene la animación anterior. La ecuación de Ct es entonces
o, simplificando las fracciones,
La ecuación de la envolvente es entonces
A menudo, cuando F no es una función racional del parámetro, se puede reducir a este caso mediante una sustitución apropiada. Por ejemplo, si la familia viene dada por Cθ con una ecuación de la forma u (x, y) cosθ + v (x, y) sinθ =w(x, y), luego poniendo t=eiθ, cosθ = (t + 1 / t) / 2, sinθ = (t - 1 / t) / 2i, cambia la ecuación de la curva a
o
La ecuación de la envolvente se da luego estableciendo el discriminante en 0:
o
Definiciones alternativas
[editar]- La envolvente E1 es el límite de las intersecciones de las curvas cercanas Ct.
- La envolvente E2 es una curva tangente a todos los Ct.
- La envolvente E3 es el límite de la región ocupada por las curvas Ct.
Luego , y , donde es el conjunto de puntos definidos al principio de la sección principal de esta subsección.
Ejemplos
[editar]Ejemplo 1
[editar]Estas definiciones de E1, E2 y E3 de la envolvente pueden ser conjuntos diferentes. Considérese por ejemplo la curva y = x3 parametrizada por γ : R → R2 donde γ(t) = (t, t3). La familia de curvas dada por un parámetro vendrá dada por las líneas tangentes a γ.
Primero se calcula el discriminante . La función generadora es
Cálculando la derivada parcial Ft = 6t(x – t). Se deduce que, o bien x = t, o t = 0. Primero se asume que x = t y que t ≠ 0. Sustituyendo en F: y así, suponiendo que t ≠ 0, se deduce que F = Ft = 0 solo si (x,y) = (t,t3). Luego, suponiendo que t = 0 y sustituyendo en F resulta F(0,(x,y)) = −y. Entonces, asumiendo que t = 0, se deduce que F = Ft = 0 solo si y = 0. Por lo tanto, el discriminante es la curva original y su línea tangente en γ (0):
Luego se calcula E1. Una curva es dada por F(t,(x,y)) = 0 y una curva cercana es dada por F(t + ε,(x,y)) donde ε es un número tan pequeño como se desee. El punto de intersección proviene de calcular el límite de F(t,(x,y)) = F(t + ε,(x,y)) ya que ε tiende a cero. Hay que tener en cuenta que F(t,(x,y)) = F(t + ε,(x,y)) si y solo si
Si t ≠ 0, entonces L tiene solo un factor dependiente de ε. Suponiendo que t ≠ 0, la intersección viene dada por
Siendo t ≠ 0 se deduce que x = t. El valor y se calcula sabiendo que este punto debe estar en una línea tangente a la curva original γ, tal que F(t,(x,y)) = 0. Sustituyendo y resolviendo da y = t3. Cuando t = 0, L es divisible por ε2. Suponiendo que t = 0, la intersección está dada por
De ahí se sigue que x = 0, y sabiendo que F(t,(x,y)) = 0 se obtiene y = 0. Resulta que
Luego se calcula E2. La curva en sí es la curva que es tangente a todas sus propias líneas tangentes. Resulta que
Finalmente se calcula E3. Cada punto en el plano tiene al menos una línea tangente a γ que pasa a través de él, por lo que la región llena por las líneas tangentes es todo el plano. El límite E3 es, por lo tanto, el conjunto vacío. De hecho, considerando un punto en el plano (x0, y0), este punto se encuentra en una línea tangente si y solo si existe un t tal que
Esto es una tercera potencia en t, y como tal, tiene al menos una solución real. Se deduce que al menos una línea tangente a γ debe pasar a través de cualquier punto dado en el plano. Si y > x3 y y > 0, cada punto ( x , y ) tiene exactamente una línea tangente a γ que pasa por ella. Lo mismo es cierto si y < x3 y < 0. Si y < x3 y y > 0, entonces cada punto (x, y) tiene exactamente tres líneas tangentes distintas para que γ pase a través de él. Lo mismo es cierto si y > x3 y y < 0. Si y = x3 y y ≠ 0, cada punto (x, y) tiene exactamente dos líneas tangentes para que γ pase por él (esto corresponde a que el cubo tiene una raíz ordinaria y una raíz repetida). Lo mismo es cierto si y ≠ x3 y y = 0. Si y = x3 y x = 0, es decir, x = y = 0, este punto tiene una sola línea tangente a γ que pasa por él (esto corresponde a que el cubo tiene una raíz real de multiplicidad 3). Resulta que
Ejemplo 2
[editar]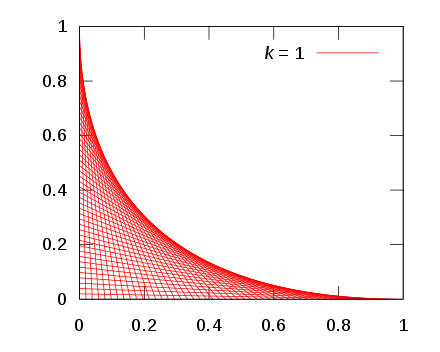
En arte con hilos tensados es común realizar una conexión cruzada de dos alineaciones de alfileres equiespaciados. ¿Qué curva se forma?
Para simplificar las fórmulas resultantes, se configuran los alfileres en los ejes x e y. Un diseño que no fuera ortogonal puede reducirse a uno que sí lo sea mediante una rotación y un escalado. Un hilo general en línea recta conecta los dos puntos (0, k −t) y (t, 0), donde k es una constante de escala arbitraria, y la familia de líneas se genera variando el parámetro t. A partir de la simple relación geométrica, la ecuación de esta línea recta es y = −(k − t) x / t + k − t.
Reordenando y reescribiendo en la forma F (x, y, t) = 0, se obtiene:
(1)
Ahora, diferenciando F (x, y, t) con respecto a t con la condición de que el resultado sea igual a cero, se obtiene
(2)
Estas dos ecuaciones definen conjuntamente la ecuación de la envolvente. De (2) se tiene que t = (−y + x + k) / 2. Sustituyendo este valor de t en (1) y simplificando, proporciona una ecuación para la envolvente en términos de x e y exclusivamente:
Esta es la familiar forma implícita de una sección cónica, en este caso un parábola. Las parábolas se mantienen como parábolas bajo rotación y escalamiento; por lo tanto, el hilorama forma un arco parabólico (un arco, ya que solo se produce una porción de la parábola completa). En este caso, una rotación en sentido antihorario de 45° da la ecuación parabólica ortogonal
- y = x2 / ( k√2) + k / (2√2)
El paso final para eliminar t no siempre es posible hacerlo analíticamente, dependiendo de la forma de F (x, y, t).
Ejemplo 3
[editar]Sea I ⊂ R un intervalo abierto tal que γ: I → R2 sea una curva plana uniforme parametrizada por la longitud de arco. Considérese la familia caracterizada por un parámetro de líneas normales a γ (I). Una línea es normal a γ en γ(t ) si pasa a través de γ (t) y es perpendicular al vector tangente a γ en γ(t). Sean T el vector unitario de la tangente a γ y N el vector normal unidad. Usando la notación de un punto (•) para denotar el producto escalar, la familia generadora monoparamétrica de líneas normales viene dada por la expresión F : I × R2 → R donde
Claramente (x − γ) · T = 0 si y solo si x − γ es perpendicular a T, o equivalentemente, si y solo si x − γ es paralela a N, o equivalentemente, si y solo si x = γ + λ N para algún λ ∈ R. Resulta que
es exactamente la línea normal a γ en γ (t0). Para encontrar el discriminante de F se necesita calcular su derivada parcial con respecto a t:
donde κ es la curvatura de γ. Se ha visto que F = 0 si y solo si x - γ = λ N para algún λ ∈ R. Suponiendo que F = 0 da
y suponiendo que κ ≠ 0 se deduce que λ = 1/κ, y así
Esta es exactamente la evoluta de la curva γ.
Ejemplo 4
[editar]
El siguiente ejemplo muestra que, en algunos casos, la envolvente de una familia de curvas puede verse como el límite topológico de una unión de conjuntos, cuyos límites son las curvas de la envolvente. Para y , considérese el triángulo rectángulo (abierto) en un plano cartesiano con vértices , y
Elíjase un exponente y considérese la unión de todos los triángulos sujetos a la restricción , es decir, el conjunto abierto
Para escribir una representación cartesiana de , comiéncese con cualquier , que satisfaga y cualquier . La desigualdad de Hölder en con respecto a los exponentes conjugados y resulta:
- ,
con igualdad si y solo si . En términos de una unión de conjuntos, la última desigualdad indica que el punto pertenece al conjunto , es decir, pertenece a algún con , si y solo si satisface que
Además, el límite en del conjunto es la envolvente de la familia correspondiente de segmentos de línea talws que
(es decir, las hipotenusas de los triángulos), y tiene una ecuación cartesiana
Obsérvese que, en particular, el valor da el arco de la parábola del ejemplo 1, y el valor (lo que significa que todas las hipotenusas son segmentos de longitud unitaria) da el astroide.
Ejemplo 5
[editar]
Considérese el siguiente ejemplo de envolvente de un movimiento. Supongamos que con la altura inicial 0, se lanza un proyectil al aire con una velocidad inicial constante v, pero con diferentes ángulos de elevación θ. Siendo x el eje horizontal del plano en el que se produce el movimiento, e y el eje vertical. Entonces, el movimiento da el siguiente sistema dinámico diferencial:
que satisface cuatro condiciones iniciales:
Aquí t indica el tiempo del movimiento, θ es el ángulo de elevación, g denota la intensidad del campo gravitatorio, y v es una constante que indica la velocidad inicial. La solución del sistema anterior puede describirse por la función implícita:
Para encontrar la ecuación de su envolvente, puede calcularse la derivada indicada:
Al eliminar θ, resulta la siguiente ecuación de la envolvente:
Claramente, la envolvente resultante es también una parábola cóncava.
Sobre de una familia de superficies
[editar]Una familia monoparamétrica de superficies en el espacio euclidiano tridimensional viene dada por un conjunto de ecuaciones
dependiente de un parámetro real a.[2] Por ejemplo, los planos tangentes a una superficie en una curva de la superficie forman dicha familia.
Dos superficies correspondientes a diferentes valores a y a' se cruzan en una curva común definida por
En el límite, cuando a' se acerca a a, esta curva tiende a una curva contenida en la superficie en a
Esta curva se llama característica de la familia en a. Como a varía el lugar de estas curvas características, define una superficie llamada envolvente de la familia de superficies.
La envolvente de una familia de superficies es tangente a cada superficie de la familia a lo largo de la curva característica en esa superficie.
Generalizaciones
[editar]La idea de una envolvente de una familia de subvariedades uniformes se deduce naturalmente. En general, si se tiene una familia de subvariedades con codimension c entonces se necesita tener al menos una familia de parámetros c de tales subvariedades. Por ejemplo: una familia de curvas de un parámetro en tres dimensiones (c = 2) no tiene, genéricamente, una envolvente.
Aplicaciones
[editar]Ecuaciones diferenciales ordinarias
[editar]Las envolventes están conectadas con el estudio de ecuaciones diferenciales ordinarias (EDO) y, en particular, a sus soluciones singulares.[3] Considérese, por ejemplo, la familia de un solo parámetro de líneas tangentes a la parábola y = x2. Estas líneas vienen dadas por la familia generadora F(t,(x,y)) = t2 – 2tx + y. El conjunto para el valor cero F(t0,(x,y)) = 0 da la ecuación de la recta tangente a la parábola en el punto (t0, t02X). La ecuación t2 – 2tx + y = 0 siempre se puede resolver para y en función de x y, por lo tanto, se considera que
Sustituyendo
da la ecuación diferencial ordinaria
No es de extrañar que y = 2tx − t2 sean todas soluciones para esta ecuación diferencial. Sin embargo, la envolvente de esta familia de líneas de un parámetro, que es la parábola y = x2, también es una solución para esta ecuación diferencial. Otro ejemplo famoso es la ecuación diferencial de Clairaut.
Ecuaciones diferenciales parciales
[editar]Las envolventes también se pueden usar para construir soluciones más complejas de ecuaciones en derivadas parciales (EDP) de primer orden a partir de otras más simples.[4] Sea F (x, u, Du) = 0 una EDP de primer orden, donde x es una variable con valores en un conjunto abierto Ω ⊂ Rn, u es una función de valor real desconocida, Du es el gradiente de u, y F es una función continuamente diferenciable que es regular en Du. Supóngase que u (x; a) es una familia de parámetros m: es decir, para cada a ∈ fijo A ⊂ Rm,u(x;a) es una solución de la ecuación diferencial. Una nueva solución de la ecuación diferencial se puede construir resolviendo primero (si es posible)
para a = φ (x) en función de x. La envolvente de la familia de funciones {u(·,a)} a∈A está definida por
y también resuelve la ecuación diferencial (siempre que exista como una función continuamente diferenciable).
Geométricamente, la gráfica de v (x) es en todas partes tangente al gráfico de algún miembro de la familia u(x;a). Dado que la ecuación diferencial es de primer orden, solo pone una condición en el plano tangente al gráfico, de modo que cualquier función en cualquier lugar tangente a una solución también debe ser una solución. La misma idea subyace a la solución de una ecuación de primer orden como una integral del cono de Monge.[5] El cono de Monge es un campo en Rn+1 de (x,u) variables cortadas por la envolvente de los espacios tangentes a la ecuación en derivadas parciales de primer orden en cada punto, por lo que cada una de sus soluciones es entonces una envolvente del campo del cono.
En geometría de Riemann, si una familia de geodésicas uniformes a través de un punto P en una variedad de Riemann tiene una envolvente, entonces P tiene un punto conjugado donde cualquier geodésica de la familia interseca la envolvente. Lo mismo es cierto más generalmente en el cálculo de variaciones: si una familia de extremales de un funcional a través de un punto dado P tiene una envolvente, entonces un punto donde un extremal cruza la envolvente es un punto conjugado a P.
Cáusticas
[editar]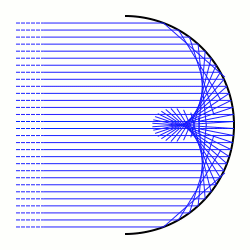
En óptica geométrica, una cáustica es la envolvente de una familia de rayos luminosos. En la imagen figura un arco de circunferencia. Los rayos de luz (que se representan en azul) provienen de una fuente en el infinito, y llegan paralelos. Cuando inciden sobre el arco circular, los rayos de luz se dispersan en diferentes direcciones de acuerdo con la ley de reflexión. Cuando un rayo de luz se refleja en un punto del arco, se comporta como si hubiera sido reflejado por la recta tangente del arco en ese punto. Los rayos de luz reflejados generan una familia monoparamétrica de líneas en el plano. La envolvente de estas líneas es la cáustica de reflexión. Una cáustica de reflexión consistirá genéricamente en puntos suaves y puntos de cúspide ordinarios.
Desde el punto de vista del cálculo de variaciones, el principio de Fermat (en su forma moderna) implica que los rayos de luz son los extremos para la función de la longitud
entre curvas suaves γ en [a, b] con puntos finales fijos γ(a) y γ(b). La cáustica determinada por un punto dado P (en la imagen, el punto está en el infinito) es el conjunto de puntos conjugados a P.[6]
Principio de Huygens
[editar]La luz puede pasar a través de medios no homogéneos anisotrópicos a diferentes velocidades, dependiendo de la dirección y de la posición inicial de cada rayo de luz. El límite del conjunto de puntos a los que la luz puede viajar desde un punto dado q después de un tiempo t se conoce como frente de onda después del tiempo t, indicado aquí por Φq (t). Consiste precisamente en los puntos que se pueden alcanzar desde q en el tiempo t viajando a la velocidad de la luz. El principio de Huygens afirma que el conjunto que forma el frente de onda Φq0(s + t) es la envolvente de la familia de frentes de onda Φq(s) para q ∈ Φq0(t). De manera más general, el punto q0 podría reemplazarse por cualquier curva, superficie o conjunto cerrado en el espacio.[7]
Véase también
[editar]Referencias
[editar]- ↑ Bruce, J. W.; Giblin, P. J. (1984), Curves and Singularities, Cambridge University Press, ISBN 0-521-42999-4.
- ↑ Eisenhart, Luther P. (2008), A Treatise on the Differential Geometry of Curves and Surfaces, Schwarz Press, ISBN 1-4437-3160-9.
- ↑ Forsyth, Andrew Russell (1959), Theory of differential equations, Six volumes bound as three, New York: Dover Publications, MR 0123757., §§100-106.
- ↑ Evans, Lawrence C. (1998), Partial differential equations, Providence, R.I.: American Mathematical Society, ISBN 978-0-8218-0772-9..
- ↑ John, Fritz (1991), Partial differential equations (4th edición), Springer, ISBN 978-0-387-90609-6..
- ↑ Born, Max (octubre de 1999), Principle of Optics, Cambridge University Press, ISBN 978-0-521-64222-4., Appendix I: The calculus of variations.
- ↑ Arnold, V. I. (1997), Mathematical Methods of Classical Mechanics, 2nd ed., Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-96890-2., §46.
Enlaces externos
[editar]- «Envelope (Mathematics)». Encyclopedia Britannica.
- Weisstein, Eric W. «Envelope». En Weisstein, Eric W, ed. MathWorld (en inglés). Wolfram Research.
- "Sobre de una familia de curvas planas" en MathCurve.
| Control de autoridades |
|
|---|
Datos: Q1060372
Multimedia: Envelopes (mathematics) / Q1060372