Spațiu vectorial
Un spațiu vectorial (numit și spațiu liniar) este o colecție de obiecte numite vectori, care pot fi adunați între ei și înmulțiți („scalați”) cu numere, denumite în acest context scalari. Scalarii sunt de multe ori luați ca numere reale, dar există și spații vectoriale în care înmulțirea cu un scalar se face cu numere complexe, numere raționale, sau, în general, din orice corp comutativ. Operațiunile de adunare vectorială și de înmulțire cu un scalar trebuie să îndeplinească anumite cerințe, numite axiome, enumerate mai jos.
Vectorii euclidieni sunt un exemplu de spațiu vectorial. Ei reprezintă cantități fizice, cum ar fi forțele: orice două forțe (de același tip) pot fi adunate pentru a produce o a treia, și înmulțirea unui vector forță cu un factor de înmulțire real dă un alt vector forță. În același fel, dar într-un sens mai geometric, vectorii care reprezintă deplasări în plan sau în spațiul tridimensional formează și ei spații vectoriale. Vectorii din spațiile vectoriale nu trebuie să fie neapărat obiecte reprezentabile prin săgeți, așa cum apar în exemplele amintite: vectorii sunt considerați ca abstracții matematice, obiecte cu proprietăți speciale, care în unele cazuri pot fi reprezentate sub forma unor săgeți.
Spațiile vectoriale fac obiectul algebrei liniare și sunt bine caracterizate prin dimensiunea lor, care, aproximativ vorbind, specifică numărul de direcții independente în spațiu. Spații vectoriale infinit-dimensionale apar în mod natural în analiza matematică, ca spații de funcții, ale căror vectori sunt funcții. Aceste spații vectoriale sunt, în general, înzestrate cu o structură suplimentară, care poate fi o topologie, care să permită luarea în considerare a aspectelor de proximitate și de continuitate. Printre aceste topologii, cele definite printr-o normă sau produs scalar sunt mai frecvent utilizate, ca având o noțiune de distanță dintre doi vectori. Este în special cazul spațiilor Banach și spațiilor Hilbert, care sunt fundamentale în analiza matematică.
Din punct de vedere istoric, primele idei care au condus la noțiunea de spațiu vectorial pot fi găsite în geometria analitică, matricile, sistemele de ecuații liniare, și vectorii euclidieni din secolul al XVII-lea. Abordarea modernă, mai abstractă, formulată pentru prima dată de către Giuseppe Peano în 1888, cuprinde obiecte mai generale decât spațiul euclidian, dar o mare parte din teorie poate fi văzută ca o extensie ideilor din geometria clasică, cum ar fi drepte, planuri și analogii în dimensiuni superioare.
Astăzi, spațiile vectoriale au aplicații în toată matematica, în științe și inginerie. Acestea sunt noțiunile liniar-algebrice adecvate pentru a trata sisteme de ecuații liniare; a oferi un cadru pentru dezvoltarea în serie Fourier, utilizată în rutinele de compresie a imaginilor; sau a oferi un mediu care poate fi folosit pentru tehnici de rezolvare a ecuațiilor cu derivate parțiale. Mai mult, spațiile vectoriale furnizează o modalitate abstractă, independentă de coordonate, de a trata obiecte fizice sau geometrice, cum ar fi tensorii. Aceasta, la rândul său, permite examinarea proprietăților locale ale varietăților prin tehnici de liniarizare. Spațiile vectoriale pot fi generalizate în mai multe moduri, ceea ce duce la mai multe noțiuni avansate în geometrie și algebra abstractă.
Introducere și definiții
[modificare | modificare sursă]Conceptul de spațiu vectorial va fi explicat în primul rând prin descrierea a două exemple concrete:
Primul exemplu: săgeți în plan
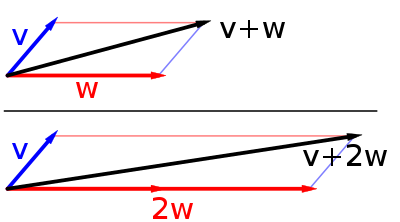
[modificare | modificare sursă]Primul exemplu de spațiu vectorial constă din săgeți într-un plan, pornind de la un punct fix (originea). Acestea sunt folosite în fizică pentru a descrie forțele sau vitezele. Date fiind oricare două astfel de săgeți, v și w, paralelogramul generat de aceste două săgeți conține o săgeată diagonală care începe și ea tot de la origine. Această nouă săgeată se numește suma celor două săgeți și este notată cu v + w. În cazul special când cele două săgeți sunt pe aceeași linie, suma lor este săgeata de pe această linie a cărui lungime este suma sau diferența de lungimi, în funcție dacă săgețile au același sens sau sensuri opuse. O altă operație care se poate face cu săgeți este scalarea: dat fiind orice număr real pozitiv a, săgeata care are aceeași direcție ca și v, dar este dilatată sau micșorată prin înmulțirea lungimii sale cu a, se numește înmulțire a lui v cu a. Acesta este notată av. Atunci când a este negativ, av este definit ca fiind o săgeată îndreptată în sens opus, pe aceeași direcție.
Următoarele arată câteva exemple: dacă a = 2, vectorul rezultat aw are aceeași direcție ca și w, dar este întins la lungime dublă față de w (dreapta imaginii de mai jos). Echivalent, 2w este suma w + w. În plus, (-1)v = −v are sens opus și aceeași lungime ca v (vectorul albastru cu vârful în jos în imaginea din dreapta).

|

|
Al doilea exemplu: perechi ordonate de numere
[modificare | modificare sursă]Un al doilea exemplu de spațiu vectorial este dat ca perechile de numere reale x și y. (Ordinea componentelor x și y este importantă, astfel încât o astfel de pereche se numește și pereche ordonată.) O astfel de pereche este scrisă sub forma (x, y). Suma a două astfel de perechi și înmulțirea unei perechi cu un număr sunt definite după cum urmează:
- (x1, y1) + (x2, y2) = (x1 + x2, y1 + y2)
și
- a (x, y) = (ax, ay).
Primul exemplu de mai sus se reduce la acesta dacă săgețile sunt reprezentate printr-o pereche de coordonate carteziene ale punctelor lor de capăt.
Definiție
[modificare | modificare sursă]Un spațiu vectorial peste un corp comutativ K este structura formată dintr-o mulțime V împreună cu două operații, care satisface cele opt axiome enumerate mai jos. Elementele din V sunt de obicei numite vectori. Elementele din K sunt de obicei numite scalari. Prima operațiune, numită adunare vectorială sau pur și simplu adunare, ia orice doi vectori v și w și le atribuie un al treilea vector, care este de obicei scris ca v + w, și se numește suma acestor doi vectori. Cea de-a doua operație, numită înmulțire cu un scalar, ia orice scalar și orice vector v și dă un alt vector.
În acest articol, vectorii sunt deosebiți de scalari prin aceea că sunt scriși cu litere îngroșate.[a] În cele două exemple de mai sus, corpul este corpul numerelor reale și mulțimea vectorilor este formată din săgeți plane având un punct fix de pornire și, respectiv, din perechi de numere reale.
Pentru a se califica drept spațiu vectorial, mulțimea V și operațiile de adunare și înmulțire cu un scalar trebuie să respecte o serie de cerințe numite axiome.[1] În lista de mai jos, fie u, v și w vectori arbitrari din V, și a și b scalari din K.
| Axioma | Înțelesul |
| Asociativitatea adunării | u + (v + w) = (u + v) + w |
| Comutativitatea adunării | u + v = v + u |
| Elementul neutru al adunării | Există un element 0 ∈ V, numit vectorul nul, astfel încât v + 0 = v pentru orice v ∈ V. |
| Elementul simetric al adunării | Pentru fiecare v ∈ V, există un element −v ∈ V, numit opusul lui v, astfel încât v + (−v) = 0. |
| Compatibilitatea(d) înmulțirii cu un scalar cu înmulțirea corpului | a(bv) = (ab)v [b] |
| Elementul neutru al înmulțirii cu un scalar | 1v = v, unde 1 reprezintă elementul neutru multiplicativ din K. |
| Distributivitatea înmulțirii cu un scalar față de adunarea vectorială | a(u + v) = au + av |
| Distributivitatea înmulțirii cu un scalar în raport cu operatorul aditiv al corpului | (a + b)v = av + av |
Aceste axiome generalizează proprietățile vectorilor introduse în exemplele de mai sus. Într-adevăr, rezultatul adunării a două perechi ordonate (ca în al doilea exemplu de mai sus) nu depinde de ordinea operanzilor:
- (xv, yv) + (x,w, y,w) = (x,w, y,w) + (xv, yv).
De asemenea, în exemplul geometric în care vectorii erau văzuți ca săgeți, v + w = w + v întrucât paralelogramul care definește adunarea vectorilor este independent de ordinea vectorilor. Toate celelalte axiome pot fi verificate într-un mod similar în ambele exemple. Astfel, făcând abstracție de natura concretă a tipului particular de vectori pe care se lucrează, definiția include aceste două exemple, și multe altele, într-o singură noțiune unificatoare de spațiu vectorial.
Scăderea a doi vectori și împărțirea la un scalar nenul poate fi definită ca:
- v − w = v + (−w),
- v/a = (1/a)v.
Atunci când corpul de scalari K este mulțimea numerelor reale R, spațiul vectorial se numește spațiu vectorial real. Atunci când câmpul scalar este mulțimea numerelor complexe, se numește spațiu vectorial complex. Aceste două cazuri sunt cele folosite cel mai adesea în inginerie. Definiția generală a unui spațiu vectorial permite ca scalarii să fie elemente din orice corp comutativ fix K, spațiul fiind denumit în acest caz spațiu vectorial peste K. Un corp comutativ este, în esență, o mulțime de numere care posedă operațiuni de adunare, scădere, înmulțire și împărțire.[c] De exemplu, numerele raționale formează și ele un corp comutativ.
Spre deosebire de analogia intuitivă care decurge din asocierea lor cu vectori în plan și din cazurile de dimensiune superioară, în spațiile vectoriale generale, nu există nicio noțiune de vecinătate, unghi sau distanță. Pentru tratarea unor astfel de probleme, se introduc tipuri particulare de spații vectoriale; vedeți mai jos.
Formule alternative și consecințe elementare
[modificare | modificare sursă]Adunarea vectorială și înmulțirea cu un scalar sunt operațiuni care îndeplinesc proprietatea de închidere: u + v și av în V pentru a din K, u, v din V. Unele surse mai vechi menționează aceste proprietăți ca axiome separate.[2]
În limbajul algebrei abstracte, primele patru axiome pot fi subsumate prin impunerea condiției ca mulțimea de vectori să fie un grup abelian în raport cu adunarea. Restul de axiome conferă acestui grup o structură de K-modul(d). Cu alte cuvinte, există un omomorfism de inele(d) f definit pe corpul K cu valori în inelul de endomorfisme(d) al grupului vectorilor. Atunci, înmulțirea cu un scalar av este definită ca (f(a))(v).[3]
Există o serie de consecințe directe ale axiomelor spațiilor vectoriale. Unele dintre ele rezultă din aplicarea teoriei elementare a grupurilor asupra grupului aditiv al vectorilor: de exemplu, vectorul zero 0 din V și elementul invers −v al oricărui vector v sunt unice. Alte proprietăți rezultă din legea distributivității, de exemplu av este egal cu 0 dacă și numai dacă a este egal cu 0 sau v este egal cu 0.
Istorie
[modificare | modificare sursă]Spațiile vectoriale rezultă din geometria afină prin introducerea de coordonate în plan sau în spațiul tridimensional. În preajma lui 1636, Descartes și Fermat au pus bazele geometriei analitice prin echivalarea soluțiilor unei ecuații cu două variabile, cu puncte de pe o curbă plană.[4] În 1804, pentru a obține soluții geometrice fără utilizarea de coordonate, Bolzano a introdus anumite operațiuni pe puncte, linii și planuri, predecesoarele vectorilor.[5] Lucrarea sa a fost apoi utilizată în conceperea coordonatelor baricentrice(d) de către Möbius în 1827.[6] În 1828, C. V. Mourey(d) sugera existența unei algebre care depășește nu numai algebra obișnuită, ci și algebra bidimensională creată de el în timp ce căuta o interpretare geometrică a numerelor complexe.[7]
Definiția vectorilor s-a bazat pe noțiunea lui Bellavitis de bipunct, un segment orientat din care un capăt este originea și altul o țintă, și apoi elaborată în continuare cu prezentarea numerelor complexe de către Argand și Hamilton și introducerea cuaternionilor și bicuaternionilor(d) de către acesta din urmă.[8] Acestea sunt elemente din R2, R4 și R8; tratarea lor drept combinații liniare(d) poate fi găsită la Laguerre în 1867, care și el a definit sisteme de ecuații liniare.
În 1857, Cayley a introdus notația matriceală, care permite o armonizare și o simplificare a aplicațiilor liniare. În același timp, Grassmann a studiat calculul baricentric inițiat de Möbius. El și-a imaginat mulțimi de obiecte abstracte dotate cu operațiuni.[9] În lucrarea sa sunt prezente conceptele de liniar-independență(d) și dimensiune, precum și cea de produs scalar. În fapt, activitatea lui Grassmann din 1844 depășește cadrul spațiilor vectoriale, deoarece abordarea înmulțirii l-a condus pe el la ceea ce astăzi numim algebre. Peano a fost primul care a dat definiția modernă a spațiilor vectoriale și a aplicațiilor liniare în 1888.[10]
O dezvoltare importantă în domeniul spațiilor vectoriale se datorează construcției spațiilor de funcții de către Lebesgue. Ulterior, aceasta a fost formalizată de către Banach și Hilbert, în preajma anului 1920.[11] La acea vreme, algebra și noul domeniu al analizei funcționale au început să interacționeze, în special cu concepte-cheie, cum ar fi spațiile de funcții p-integrabile și spațiile Hilbert.[12] Spațiile vectoriale, inclusiv cele infinit-dimensionale, au devenit mai târziu noțiuni ferm stabilite, și multe ramuri matematice au început să facă uz de aceste concepte.
Exemple
[modificare | modificare sursă]Spații de coordonate
[modificare | modificare sursă]Cel mai simplu exemplu de spațiu vectorial peste un corp comutativ K este corpul însuși, echipat cu adunarea și înmulțirea standard. Mai mult, în general, un spațiu vectorial poate fi compus din n-tupluri(d) (secvențe de lungime n) de elemente din K, cum ar fi
- (a1, a2, ..., an), unde fiecare ai este un element din K.[13]
Un spațiu vectorial compus din toate n-tuplurile unui corp K este cunoscut drept spațiu de coordonate(d), de obicei, notat cu Kn. Cazul n = 1 este mai sus-menționatul exemplu simplu, în care corpul K este considerat și spațiu vectorial peste el însuși. Cazurile K = R și n = 2 au fost discutate în introducerea de mai sus.
Numerele complexe și alte extinderi ale corpului
[modificare | modificare sursă]Mulțimea numerelor complexe C, de exemplu, numere care pot fi scrise sub forma x + iy pentru x și y numere reale, unde i este unitatea imaginară, formează un spațiu vectorial peste numerele reale cu obișnuitele operațiuni de adunare și înmulțire cu un scalar: (x + iy) + (o + ib) = (x + o) + i(y + b) și c ⋅ (x + iy) = (c ⋅ x) + m(c ⋅ y) pentru numerele reale x, y, a, b și c. Diferite axiome ale spațiilor vectoriale rezultă din faptul că aceleași reguli rămân valabile pentru aritmetica numerelor complexe.
De fapt, exemplul numerelor complexe este, în esență, aceleași (adică este izomorf) cu spațiul vectorial al perechilor ordonate de numere reale menționat mai sus: dacă ne gândim la numărul complex x + i y ca reprezentând perechea ordonată (x, y) în planul complex, atunci vom vedea că regulile pentru sumă și produs scalar corespund exact cu cele din exemplul anterior.
Mai mult, în general, extinderile de corp oferă o altă clasă de exemple de spații vectoriale, în special în algebră și teoria algebrică a numerelor(d): un corp K care conține un corp mai mic E este spațiu vectorial peste E, prin operațiunile de înmulțire și de adunare date din K.[14] De exemplu, numerele complexe sunt un spațiu vectorial peste R, iar extinderea de corp este un spațiu vectorial peste Q.
Spații de funcții
[modificare | modificare sursă]Funcțiile definite pe orice mulțime fixă Ω cu valori într-un corp comutativ K formează și ele spații vectoriale, prin efectuarea punctuală a operațiunilor de adunare și înmulțire cu un scalar. Adică suma a două funcții f și g este funcția (f + g) dată de
- (f + g)(w) = f(w) + g(w),
și în mod similar pentru înmulțire. Astfel de spații funcționale apar în multe situații geometrice, atunci când Ω este dreapta reală sau un interval, sau alte submulțimi ale lui R. Multe noțiuni de topologie și analiză, cum ar fi continuitatea, integrabilitatea sau derivabilitatea se comportă bine în raport cu liniaritatea: adunarea și înmulțirea cu un scalar a funcțiilor care posedă o astfel de proprietate o conservă.[15] Prin urmare, mulțimea acestor funcții este spațiu vectorial. Ele sunt studiate în detaliu, folosind metodele de analiză funcțională. Constrângerile algebrice produc și ele spații vectoriale: spațiul vectorial F[x](d) este dat de polinoamele:
- f(x) = r0 + r1x + ... + rn-1xn-1 + rnxn, unde coeficienții r0, ..., rn sunt în F.[16]
Ecuații liniare
[modificare | modificare sursă]Sistemele de ecuații liniare omogene sunt strâns legate de spațiile vectoriale.[17] De exemplu, soluțiile sistemului
a + 3b + c = 0 4a + 2b + 2c = 0
sunt date de triplete arbitrare cu a, b = a/2 și c = −5a/2. Ele formează un spațiu vectorial: și după adunarea și înmulțirea cu un scalar a acestui gen de triplete, ele continuă să satisfacă aceleași raporturi dintre cele trei variabile; astfel și ele sunt soluții. Matricele pot fi folosite pentru a condensa mai multe ecuații liniare ca mai sus într-o singură ecuație vectorială, și anume:
- Ax = 0,
unde A = este matricea care conține coeficienții ecuațiilor date, x este vectorul (a, b, c), Ax reprezintă înmulțirea de matrice, și 0 = (0, 0) este vectorul zero. În mod similar, soluții ecuațiilor diferențiale liniare formează spații vectoriale. De exemplu,
- f"(x) + 2f'(x) + f(x) = 0
produce f(x) = a e−x + bx e−x, unde a și b sunt constante arbitrare, și ex e funcția exponențială cu baza naturală.
Baza și dimensiunea
[modificare | modificare sursă]
Bazele permit reprezentarea vectorilor cu ajutorul unui șir de scalari numit coordonate sau componente. O bază este o mulțime (finită sau infinită) B = {bi}i ∈ I de vectori bam, pentru comoditate de multe ori indexați cu un indice(d) i, care generează întregul spațiu și este liniar independentă. „Care generează întregul spațiu” înseamnă că orice vector v poate fi exprimat ca sumă finită (numită combinație liniară) a elementelor bazei: unde ak sunt scalari, numiți coordonatele (sau componentele) vectorului v în raport cu baza B, iar bik (k = 1, ..., n) elemente din B. Independența liniară înseamnă că coordonatele ak sunt unic determinate pentru orice vector din spațiul vectorial.
De exemplu, versorii e1 = (1, 0, ..., 0), e2 = (0, 1, 0, ..., 0), până la en = (0, 0, ..., 0, 1), formează o bază în Kn, numit bază canonică(d), deoarece orice vector (x1, x2, ..., xn) poate fi exprimat unic ca o combinație liniară a acestor vectori:
- (x1, x2, ..., xn) = x1(1, 0, ..., 0) + x2(0, 1, 0, ..., 0) + ... + xn(0, ..., 0, 1) = x1e1 + x2e2 + ... + xnen.
Coordonatele corespunzătoare x1, x2, ..., xn sunt coordonatele carteziene ale vectorului.
Fiecare spațiu vectorial are o bază. Acest lucru rezultă din lema lui Zorn, o formulare echivalentă a axiomei alegerii.[18] Date fiind celelalte axiome ale teoriei mulțimilor Zermelo–Fraenkel, existența bazelor este echivalentă cu axioma alegerii.[19] Teorema idealului prim(d), care este mai slabă decât axioma alegerii, implică faptul că toate bazele unui anumit spațiu vectorial au același număr de elemente, sau același cardinal(d) (cf. teorema dimensiunii spațiilor vectoriale(d)).[20] Acest cardinal se numește dimensiunea spațiului vectorial, notată dim V. Dacă spațiul este generat de un număr finit de vectori, afirmațiile de mai sus pot fi demonstrate fără o astfel de informație fundamentală din teoria mulțimilor.[21]
Dimensiunea de spațiului de coordonate Kn este n, conform bazei expuse mai sus. Dimensiunea inelului polinomial F[x] introdus mai sus este infinit numărabilă, o bază fiind dată de 1, x, x2, ... a fortiori(d), dimensiunea spațiilor mai generale de funcții, cum ar fi spațiul funcțiilor pe un interval (mărginit sau nemărginit), este infinită.[d] Sub ipoteze potrivite de regularitate a coeficienților implicați, dimensiunea spațiului soluției unei ecuații diferențiale ordinare omogene este egal cu gradul ecuației.[22] De exemplu, spațiul soluțiilor ecuației de mai sus este generat de e−x și xe−x. Aceste două funcții sunt liniar independente peste R, astfel încât dimensiunea acestui spațiu este doi, atât cât este și gradul ecuației.
O extindere de corp peste mulțimea numerelor raționale Q poate fi gândită ca spațiu vectorial peste Q (prin definirea adunării vectoriale ca adunarea corpului, definirea înmulțirii scalarilor ca fiind înmulțirea cu elemente din Q, și altfel ignorând înmulțirea corpului). Dimensiunea (sau gradul) de extinderii de domeniu Q(α) peste Q depinde de α. Dacă α satisface o ecuație polinomială
- qnαn + qn-1αn-1 + ... + q0 = 0, cu coeficienți raționali qn, ..., q0.
(„α este algebric”), dimensiunea este finită. Mai exact, este egală cu gradul polinomului minimal având α ca rădăcină.[23] De exemplu, numerele complexe C formează un spațiu vectorial bidimensional real, generat de baza formată din 1 și unitatea imaginară i. Acesta îndeplinește condiția i2 + 1 = 0, ecuație de gradul doi. Astfel, C este R-spațiu vectorial bidimensional (și, ca și orice corp comutativ, unidimensional ca spațiu vectorial peste el însuși, C). Dacă α nu este algebric, dimensiunea Q(α) peste Q este infinită. De exemplu, pentru α = π nu există nici o astfel de ecuație, cu alte cuvinte π este transcendent.[24]
Aplicații liniare și matrice
[modificare | modificare sursă]Relația dintre două spații vectoriale poate fi exprimată printr-o aplicație liniară sau transformare liniară. Acestea sunt funcții care reflectă structura spațiului vectorial, adică ele conservă sumele și înmulțirea cu un scalar:
- f(x + y) = f(x) + f(y) și f(a · x) = a · f(x) pentru orice x și y din V, orice a din K.[25]
Un izomorfism este o aplicație liniară f : V → W astfel încât există o aplicație inversă g : W → V, cu proprietatea că cele două compuneri(d) posibile f ∘ g : W → W și g ∘ f : V → V sunt egale cu aplicația identitate. Echivalent, f este atât injectivă cât și surjectivă.[26] Dacă există un izomorfism între V și W, se spune că cele două spații sunt izomorfe; acestea sunt, în esență, identice ca spații vectoriale, deoarece toate identitățile valabile în V sunt, prin intermediul lui f, transformate în altele similare în W, și vice-versa prin g.

De exemplu, spațiile vectoriale „săgeți în plan” și „perechi ordonate de numere” din introducere sunt izomorfe: o săgeată în plan v care pornește din originea unui sistem de coordonate (fix) poate fi exprimată ca o pereche ordonată considerând componentele x și y ale săgeții, așa cum se arată în imaginea din dreapta. Analog, având în vedere o pereche (x, y), săgeata care duce x spre dreapta (sau spre stânga, dacă x este negativ), și y în sus (sau în jos, dacă y este negativ) se transformă înapoi în săgeata v.
Aplicațiile liniare V → W între două spații vectoriale formează un spațiu vectorial HomF(V, W), notat și cu L(V, W).[27] Spațiul aplicațiilor liniare de la V la K se numește spațiul vectorial dual(d), notat cu V*.[28] Prin intermediul aplicației injective naturale(d) V → V∗∗, orice spațiu vectorial poate fi încorporat în bidualul său; aplicația este un izomorfism dacă și numai dacă spațiul este finit-dimensional.[29]
Odată fiind aleasă o bază a lui V, aplicațiile liniare f : V → W sunt complet determinate prin specificarea imaginilor vectorilor din bază, deoarece orice element din V se exprimă în mod unic ca o combinație liniară a acestora.[30] Dacă dim V = dim W, o corespondență 1-la-1 între bazele fixe ale lui V și W dă naștere la o aplicație liniară care mapează orice element din baza lui V cu un element corespunzător din baza lui W. Este un izomorfism, prin definiție.[31] Prin urmare, două spații vectoriale sunt izomorfe dacă au aceeași dimensiune și vice-versa. Un alt mod de a exprima acest lucru este că orice spațiu vectorial este complet clasificat (până la izomorfism) de dimensiunea acestuia, un singur număr. În special, orice K-spațiu vectorial V n-dimensional este izomorf cu Kn. Cu toate acestea, nu există un izomorfism „canonic” sau preferat; de fapt un izomorfism φ : Kn → V este echivalent cu alegerea unei baze a lui V, mapând baza standard a lui Kn cu V, prin intermediul lui φ. Libertatea de a alege o bază convenabilă este deosebit de utilă în context infinit-dimensional.
Matrice
[modificare | modificare sursă]
Matricele sunt o noțiune utilă pentru codificarea aplicațiilor liniare.[32] Ele sunt scrise ca un tablou dreptunghiular de scalari ca în imaginea din dreapta. Orice matrice m-pe-n A dă naștere unei aplicații liniare de la Kn la Km, cu următoarea lege:
- , unde cu se notează suma,
sau, folosind înmulțirea matriceală a lui A cu coordonatele vectorului x:
- x ↦ Ax.
Mai mult decât atât, după alegerea bazelor lui V și W, orice aplicație liniară f : V → W este unic reprezentată de o matrice prin această atribuire.[33]

Determinantul det(A) al unei matrice pătrate A este un scalar care spune dacă aplicația liniară asociată este un izomorfism sau nu: pentru a fi izomorfism, este suficient și necesar ca determinantul să fie nenul.[34] Transformarea liniară a lui Rn corespunzătoare unei matrice reale n-pe-n conservă orientarea(d) dacă și numai dacă determinantul este pozitiv.
Vectori și valori proprii
[modificare | modificare sursă]Endomorfismele(d), aplicații liniare f : V → V, sunt deosebit de importante deoarece, în acest caz, vectorii v pot fi comparați cu imaginea lor în raport cu f, f(v). Orice vector nenul v care satisface λv = f(v), unde λ este un scalar, se numește vector propriu al lui f cu valoarea proprie λ.[35] Echivalent, v este un element al nucleului diferenței f − λ · Id (în cazul în care Id este aplicația identitate V → V). Dacă V este finit dimensional, acest lucru poate fi reformulat folosind determinanți: f având valoarea proprie λ este echivalent cu
- det(f − λ · Id) = 0.
Dezvoltând definiția determinantului, expresia din partea stângă poate fi considerată a fi o funcție polinomială în λ, numită polinom caracteristic(d) al f.[36] Dacă F este suficient de mare pentru a conține o rădăcină a acestui polinom (care în mod automat se întâmplă pentru F algebric închis, cum este K = C) orice aplicație liniară are cel puțin un vector propriu. Spațiul vectorial V poate sau nu să posede o bază proprie, bază formată din vectori proprii. Acest fenomen este guvernat de forma canonică Jordan(d) a aplicației.[37] Mulțimea tuturor vectorilor proprii corespunzători unei anumite valori proprii a lui f formează un spațiu vectorial cunoscut ca spațiul vectorial propriu corespunzătoare valorii proprii (și lui f) în cauză. Pentru a ajunge la teorema spectrală(d), afirmația corespunzătoare în cazul infinit-dimensional, este nevoie de mecanismele analizei funcționale.
Construcția bazelor
[modificare | modificare sursă]În plus față de exemplele concrete de mai sus, există mai multe construcții liniare algebrice standard care generează spații vectoriale legate de cele date. În plus față de definițiile prezentate mai jos, acestea sunt și ele caracterizate prin proprietăți universale(d), care determină un obiect X prin specificarea aplicațiilor liniare de la X la orice alt spațiu vectorial.
Subspații și spații factor
[modificare | modificare sursă]
O submulțime nevidă W a unui spațiu vectorial V , care este închisă în raport cu adunarea și cu înmulțirea cu un scalar (și, prin urmare, conține vectorul zero din V) se numește subspațiu vectorial al lui V, sau pur și simplu subspațiu al lui V, atunci când spațiul ambiental este fără echivoc spațiu vectorial.[38][e] Subspațiile lui V sunt spații vectoriale (peste același corp) de sine stătătoare. Intersecția tuturor subspațiilor conține o anumită mulțime S de vectori numită generatoare(d), și acesta este cel mai mic subspațiu al lui V care conține mulțimea S. Exprimat în termeni de elemente, generatoarea este subspațiul format din toate combinațiile liniare(d) de elemente din S.[39]
Un subspațiu liniar de dimensiune 1 este o dreaptă vectorială. Un subspațiu liniar de dimensiune 2 este un plan de vectori. Un subspațiu liniar care conține toate elementele de bază din spațiul ambiental este un hiperplan de vectori. Într-un spațiu vectorial de dimensiune finită n, un hiperplan este astfel un subspațiu de dimensiune n – 1.
Omologul subspațiilor este spațiul vectorial factor.[40] Dat fiind orice subspațiu W ⊂ V, spațiul factor V/W ("V modulo(d) W") este definit după cum urmează: ca mulțime, el se compune din v + W = {v + w : w ∈ W}, unde v este un vector arbitrar din V. Suma a două astfel de elemente v1 + W și v2 + W este (v1 + v2) + W, și înmulțirea cu un scalar este dată de un · (v + W) = (o · v) + W. Punctul cheie în această definiție este faptul că v1 + W = v2 + W dacă și numai dacă diferența dintre v1 și v2 se află în W.[f] Astfel, spațiul factor „uită” informațiile conținute în subspațiul W.
Nucleul ker(f) unei aplicații liniare f : V → W este format din vectorii v care sunt mapați la 0 din W.[41] Atât nucleul cât și imaginea im(f) = {f(v) : v ∈ V} sunt subspații ale lui V și, respectiv, W.[42] Existența nucleelor și imaginilor face parte din afirmația că categoria spațiilor vectoriale(d) (peste un corp comutativ fix K) este categorie abeliană(d), adică un grup de obiecte matematice și aplicații de la una la alta care conservă structura (o categorie), care se comportă ca și categoria grupurilor abeliene(d).[43] De aceea, multe afirmații, cum ar fi prima teoremă de izomorfism(d) (numită și teorema rangului(d) în termeni de matrice)
- V / ker(f) ≡ im(f).
și a doua și a treia teoremă de izomorfism pot fi formulate și demonstrate într-un mod foarte similar cu situațiile corespunzătoare pentru grupuri.
Un exemplu important este nucleul unei aplicații liniare x ↦ Ax pentru o matrice fixă A, ca mai sus. Nucleul aceastei aplicații este un subspațiu de vectori x, astfel încât Ax = 0, care este tocmai mulțimea soluțiilor sistemului omogen de ecuații liniare care aparțin lui A. De asemenea, acest concept se extinde la ecuații diferențiale liniare
- , unde coeficienții ai sunt și ei funcții de x.
În aplicația corespunzătoare
- ,
derivatele funcției f apar liniar (adică nu apar de exemplu sub forma de f''(x)2). Când diferențierea este o procedură liniară (adică (f + g)' = f' + g ' și (c·f)' = c·f' pentru orice constantă c) această atribuire este liniară, și se numește operator diferențial liniar(d). În particular, soluțiile ecuației diferențiale D(f) = 0 formează un spațiu vectorial (peste R sau C).
Produsul direct și suma directă
[modificare | modificare sursă]Produsul direct al unor spații vectoriale și suma directă a unor spații vectoriale sunt două moduri de a combina o familie indexată de spații vectoriale într-un nou spațiu vectorial.
Produsul direct al unei familii de spații vectoriale vi constă din mulțimea tuturor tuplurilor (vi)i ∈ I, care specifică pentru fiecare indice i dintr-o mulțime de indici(d) I un element vi al lui Vi.[44] Adunarea și înmulțirea cu un scalar se realizează pe componente. O variantă a acestei construcții este suma directă (notată cu ), în care sunt permise numai tuplurile cu un număr finit de vectori nenuli. Dacă mulțimea de indici I este finită, cele două construcții sunt în acord, dar, în general, ele sunt diferite.
Produsul tensorial
[modificare | modificare sursă]Produsul tensorial V ⊗F W, sau mai simplu V ⊗ W, a două spații vectoriale V și W este una dintre noțiunile centrale ale algebrei multiliniare(d) care se ocupă cu extinderea noțiunilor cum ar fi aplicațiile liniare la mai multe variabile. O aplicație g : V × W → X se numește biliniară dacă g este liniară în ambele variabile v și w. Cu alte cuvinte, pentru un w fix, aplicația v ↦ g(v, w) este liniară în sensul de mai sus și analog pentru v fix.
Produsul tensorial este un anumit spațiu vectorial care este primitor universal al aplicațiilor biliniare g, după cum urmează. Este definit ca spațiu vectorial format din sume finite (formale) de simboluri numite tensori
- v1 ⊗ w1 + v2 ⊗ w2 + ... + vn ⊗ wn,
supuse regulilor
- a · (v ⊗ w) = (a · v) ⊗ w = v ⊗ (a · w), unde a este un scalar,
- (v1 + v2) ⊗ w = v1 ⊗ w + v2 ⊗ w, și
- v ⊗ (w1 + w2) = v ⊗ w1 + v ⊗ w2.[45]

Aceste reguli asigură că aplicația f definită pe V × W cu valori în V ⊗ W care mapează un tuplu(d) (v, w) în v ⊗ w este biliniară. Universalitatea afirmă că, dat fiind orice spațiu vectorial X și orice aplicație biliniară g : V × W → X, există o aplicație unică u, arătată în diagramă cu o săgeată punctată, a cărei compoziție(d) cu f este egală cu g: u(v ⊗ w) = g(v, w).[46] Aceasta se numește proprietatea universală(d) a produsului tensorial, un exemplu de metodă mult utilizată în algebra abstractă avansată—pentru a defini indirect obiecte prin specificarea unor aplicații definite pe acel obiect sau cu valori în el.
Spații vectoriale cu structură suplimentară
[modificare | modificare sursă]Din punctul de vedere al algebrei liniare, spațiile vectoriale sunt complet înțelese în măsura în care orice spațiu vectorial este caracterizat, până la izomorfism, prin dimensiunea sa. Cu toate acestea, spațiile vectoriale în sine nu oferă un cadru de abordare a chestiunii—cruciale pentru analiză—dacă un șir de funcții converge către o altă funcție. De asemenea, algebra liniară nu este adaptată pentru a trata șiruri infinite, deoarece operația aditivă permite adunarea numai a unui număr finit de termeni. Prin urmare, nevoile analizei funcționale impun considerarea unor structuri suplimentare.
Unui spațiu vectorial i se poate da o relație de ordine parțială ≤, în care unii vectori pot fi comparați.[47] De exemplu, spațiul n-dimensional real Rn poate fi ordonat prin compararea vectorilor pe componente. Spațiile vectoriale ordonate(d), cum ar fi spațiile Riesz(d), sunt fundamentale pentru integrarea Lebesgue(d), care se bazează pe capacitatea de a exprima o funcție ca o diferență de două funcții pozitive
- f = f+ − f−,
unde f+ reprezintă partea pozitivă a lui f și f− partea negativă.[48]
Spații vectoriale normate și spații cu produs scalar
[modificare | modificare sursă]„Măsurarea” vectorilor se face prin specificarea unei norme, un datum care măsoară lungimi de vectori, sau printr-un produs scalar, care măsoară unghiurile dintre vectori. Normele și produsele scalare se notează cu și, respectiv, cu . Natura unui produs scalar presupune că lungimile de vectori pot fi și ele definite, prin definirea normei asociate . Spațiile vectoriale înzestrate cu astfel de date sunt cunoscute sub denumirea de spații vectoriale normate și, respectiv, spații prehilbertiene.[49]
Coordonatele spațiului Kn pot fi echipate cu produsul scalar standard:
În R2, acest lucru reflectă noțiunea comună de unghi între doi vectori x și y, prin legea cosinusurilor:
Din această cauză, doi vectori care satisfac relația se numesc ortogonali. O variantă importantă a produsului scalar standard este folosită în spațiul Minkowski: R4 înzestrat cu produsul Lorentz
Spre deosebire de produsul scalar standard, acesta nu este pozitiv definit(d): ia și valori negative, de exemplu pentru . Izolarea celei de-a patra coordonate corespunzătoare timpului, spre deosebire de cele trei dimensiuni ale spațiului—îl face util pentru tratarea matematică a relativității restrânse.
Spatii vectoriale topologice
[modificare | modificare sursă]Chestiunile de convergență sunt tratate prin luarea în considerare a spațiilor vectoriale V care au și o topologie compatibilă, o structură care ne permite să vorbim despre elemente ca fiind aproape unul de altul.[51][52] „Compatibil” aici înseamnă că, adunarea și înmulțirea cu un scalar trebuie să fie aplicații continue. Aproximativ, dacă x și y din V, și a din K variază cu o cantitate mărginită, atunci la fel variază și x + y și ax.[g] Pentru a avea sens precizarea cantității cu care se modifică un scalar, corpul K trebuie să aibă în acest context și o topologie; o alegere comună sunt numerele reale sau cele complexe.
În astfel de spații vectoriale topologice, se poate considera un șir de vectori. Suma infinită
reprezintă limita sumelor parțiale finite ale șirului (fi)i∈N de elemente din V. De exemplu, fi ar putea fi funcții (reale sau complexe) aparținând unui spațiu funcțional V, caz în care seria este o serie de funcții(d). Modul de convergență(d) al seriei depinde de topologia impusă spațiului de funcții. În astfel de cazuri, convergența punctuală și convergența uniformă(d) sunt două exemple elocvente.

O modalitate de a asigura existența unor limite ale anumitor serii infinite este de a restricționa atenția asupra spațiilor în care orice șir Cauchy este convergent; un astfel de spațiu vectorial se numește complet. Aproximativ, un spațiu vectorial este complet cu condiția ca acesta să conțină toate limitele necesare. De exemplu, spațiul vectorial al polinoamelor definite pe intervalul unitate [0,1], echipat cu topologia convergenței uniforme(d) nu este complet, deoarece orice funcție continuă pe [0,1] poate fi uniform aproximată printr-un șir de polinoame, de către teorema de aproximare Weierstrass(d).[53] În schimb, spațiul tuturor funcțiilor continue pe [0,1] cu aceeași topologie este complet.[54] O normă dă naștere unei topologii prin definirea noțiunii că un șir de vectori vn converge în v dacă și numai dacă
Spațiile Banach și Hilbert sunt spații vectoriale topologice complete ale căror topologii sunt date de o normă și, respectiv, de un produs scalar. Studiul lor—o piesă-cheie în analiza funcțională—se axează pe spații vectoriale infinit-dimensionale, deoarece toate normele pe spații vectoriale topologice finit-dimensionale dau naștere la aceeași noțiune de convergență.[55] Imaginea din dreapta arată echivalența 1-normei și ∞-normei pe R2: cum „bilele” unitate se includ una pe alta, un șir converge la zero într-una din norme, dacă și numai dacă el converge și în cealaltă. În cazul infinit-dimensional însă vor exista, în general, topologii neechivalente, care fac studiul spațiilor vectoriale topologice mai bogat decât cel al spațiilor vectoriale fără date suplimentare.
Din punct de vedere conceptual, toate noțiunile legate de spații vectoriale topologice ar trebui să se potrivească cu topologia. De exemplu, în loc de a considera toate aplicațiile liniare (denumite și funcționale(d)) V → W, aplicațiile între spații vectoriale topologice sunt obligate să fie continue.[56] În special, spațiul dual (topologic) V∗ constă din funcționale continue V → R (sau C). Teorema fundamentală Hahn–Banach(d) tratează separarea subspațiilor corespunzătoare spațiilor vectoriale topologice de funcționalele continue.[57]
Spații Banach
[modificare | modificare sursă]Spațiile Banach, prezentate de Stefan Banach, sunt spații vectoriale complete normate.[58] Un prim exemplu este spațiul vectorial ℓ p constând din vectori infiniți cu elemente reale x = (x1, x2, ...) ale căror p-norme (1 ≤ p ≤ ∞) date de
- pentru p < ∞ și
sunt finite. Topologiile pe spațiul infinit-dimensional ℓ p sunt neechivalente pentru p diferite. De exemplu, șirul de vectori xn = (2−n, 2−n, ..., 2−n, 0, 0, ...), adică primele 2n cu valoarea 2−n, și următoarele 0, converge la vectorul nul pentru p = ∞, dar nu și pentru p = 1:
- , dar
Mai general decât șirurile de numere reale, funcțiile f: Ω → R sunt dotate cu o normă care înlocuiește suma de mai sus cu integrala Lebesgue(d)
Spațiul funcțiilor integrabile pe un anumit domeniu Ω (de exemplu un interval) care satisfac | f |p < ∞, și sunt echipate cu această normă se numesc spații Lebesgue, notate Lp(Ω).[h] Aceste spații sunt complete.[59] (Dacă se folosește integrala Riemann în schimb, spațiul nu este complet, ceea ce poate fi considerat a fi o justificare pentru teoria integrării Lebesgue.[i]) Concret, aceasta înseamnă că pentru orice șir de funcții integrabile Lebesgue f1, f2, ... , cu | fn |p < ∞, care îndeplinesc condiția
există o funcție f(x) aparținând spațiului vectorial Lp(Ω), astfel încât
Impunerea condițiilor de mărginire nu numai pe funcție, ci și pe derivatele ei, duce la spații Sobolev(d).[60]
Spații Hilbert
[modificare | modificare sursă]
Spațiile prehilbertiene complete se numesc spații Hilbert, în cinstea lui David Hilbert.[61] În spațiul Hilbert L2(Ω), cu produsul scalar dat de
unde cu se notează conjugata complexă a lui g(x),[62][j] este un caz-cheie.
Prin definiție, într-un spațiu Hilbert, orice șir Cauchy converge la o limită. În schimb, este la fel de importantă și găsirea unui șir de funcții fn cu proprietățile dorite care aproximează o anumită funcție-limită. Analiza timpurie, sub forma aproximării Taylor, a stabilit o aproximare a funcțiilor derivabile f cu polinoame.[63] Conform teoremei Stone–Weierstrass(d), orice funcție continuă pe [a, b] poate fi aproximată oricât de îndeaproape se dorește cu un polinom.[64] O tehnică similară de aproximare cu funcții trigonometrice se numește de obicei dezvoltare în serie Fourier, și este aplicată frecvent în inginerie, a se vedea mai jos. Mai general, și mai conceptual, teorema dă o simplă descriere a ce „funcții de bază”, sau, în spațiile Hilbert abstracte, a ce vectori din bază sunt suficienți pentru a genera un spațiu Hilbert H, în sensul că închiderea(d) intervalului generat de ele (de exemplu, combinațiile liniare finite și limitele acestora) este întregul spațiu. O astfel de mulțime de funcții se numește o bază a lui H, cardinalitatea sa fiind cunoscută ca dimensiune a spațiului Hilbert.[k] Nu numai că teorema prezintă funcțiile corespunzătoare din bază ca fiind suficiente pentru scopul aproximării, ci, împreună cu procedeul Gram-Schmidt, ea permite și construirea unei baze de vectori ortogonali(d).[65] Astfel de baze ortogonale sunt generalizările la nivel de spațiu Hilbert ale axelor de coordonate în spațiul euclidian finit-dimensional.
Soluțiile a diverse ecuații diferențiale pot fi interpretate în termeni de spații Hilbert. De exemplu, numeroase domenii ale fizicii și ingineriei duc la astfel de ecuații și soluții cu anumite proprietăți fizice sunt frecvent utilizate ca funcții de bază, de multe ori ortogonale.[66] Ca un exemplu din fizică, ecuația lui Schrödinger dependentă de timp din mecanica cuantică descrie schimbarea proprietăților fizice în timp printr-o ecuație cu derivate parțiale, ale cărei soluții sunt numite funcții de undă.[67] Valorile definite pentru proprietățile fizice, cum ar fi energia, sau impulsul, corespund valorilor proprii ale unui operator diferențial(d) (liniar) și funcțiile de undă asociate se numesc stări proprii. Teorema spectrală(d) descompune un operator compact(d) liniar care acționează asupra funcțiilor în termenii acestor funcții proprii și valorilor lor proprii.[68]
Algebre peste corpuri
[modificare | modificare sursă]
Spațiile vectoriale generale nu posedă o înmulțire între vectori. Un spațiu vectorial dotat un operator biliniar care definește înmulțirea a doi vectori este o algebră peste un corp.[69] Multe algebre rezultă din funcții definite pe unele obiecte geometrice: întrucât funcțiile cu valori într-un anumit domeniu pot fi înmulțite punctual, aceste entități formează algebre. Teorema Stone–Weierstrass menționată mai sus, de exemplu, se bazează pe algebre Banach(d), care sunt atât spații Banach, cât și algebre.
Algebra comutativă face mare uz de inele de polinoame(d) într-una sau mai multe variabile, introduse mai sus. Înmulțirea lor este atât comutativă, cât și asociativă. Aceste inele și factorii lor formează baza geometriei algebrice, deoarece acestea sunt inele de funcții de obiecte geometrice algebrice(d).[70]
Un alt important exemplu sunt algebrele Lie, care nu sunt nici comutative și nici asociative, dar faptul că nu sunt limitate de constrângerile ([x, y] reprezintă produsul dintre x și y):
- [x, y] = −[y, x] (anticomutativitate(d)), și
- [x, [y, z]] + [y, [z, x]] + [z, [x, y]] = 0 (identitatea Jacobi(d)).[71]
Printre exemple se numără spațiul vectorial al matricelor n-pe-n, cu [x, y] = xy − yx, comutatorul(d) a două matrice, și R3, dotat cu produsul vectorial.
Algebra tensorială(d) T(V) este un mod formal de a adăuga produsul la orice spațiu vectorial V pentru a obține o algebră.[72] Ca spațiu vectorial, este generat de simboluri, numite simplu tensori
- v1 ⊗ v2 ⊗ ... ⊗ vn, unde gradul n variază.
Înmulțirea este dată prin concatenarea acestor simboluri, care impune în plus legea distributivă față de adunare, și faptul că necesită ca înmulțirea cu un scalar să fie comutativă cu produsul tensorial ⊗, în același fel ca și produsul tensorial a două spații vectoriale introdus mai sus. În general, nu există relații între v1 ⊗ v2 și v2 ⊗ v1. Forțând două astfel de elemente să fie egale, se obțin algebre simetrice(d), pe când punerea condiției ca v1 ⊗ v2 = − v2 ⊗ v1 dă algebre exterioare.[73]
Aplicații
[modificare | modificare sursă]Spații vectoriale au multiple aplicații întrucât apar în multe situații, și anume oriunde sunt implicate funcții cu valori într-un anumit corp. Ele oferă un cadru de tratare a problemelor analitice și geometrice, sau sunt utilizate în transformata Fourier. Această listă nu este exhaustivă: există mult mai multe aplicații, de exemplu, în optimizare. Teorema minimax(d) din teoria jocurilor, care afirmă existența unui câștig unic atunci când toți jucătorii joacă optim poate fi formulată și demonstrată folosind metode cu spații vectoriale.[74] Teoria reprezentării reușește să transfere buna înțelegere a algebrei liniare și a spațiilor vectoriale în alte domenii matematice, cum ar fi teoria grupurilor.[l]
Distribuții
[modificare | modificare sursă]O distribuție (sau o funcție generalizată) este o aplicație liniară ce atribuie un număr fiecărei funcții „test”(d), de obicei, o funcție netedă(d) cu suport compact(d), într-un mod continuu: în terminologia de mai sus, spațiul distribuțiilor este dualul (continuu) al spațiului funcției „test”.[75] Acesta din urmă este dotat cu o topologie care ia în considerare nu numai pe f în sine, ci și toate derivatele sale superioare. Un exemplu standard este rezultatul integrării unei funcții test f pe un domeniu Ω:
Atunci când Ω = {p}, mulțimea formată dintr-un singur punct, aceasta se reduce la distribuția Dirac, notată cu δ, care asociază unei funcții test f valoarea sa în punctul p: δ(f) = f(p). Distribuțiile sunt un instrument puternic de rezolvare a ecuațiilor diferențiale. Deoarece toate noțiunile analitice standard, cum ar fi derivatele, sunt liniare, ele se extind în mod natural în spațiul distribuțiilor. Prin urmare, ecuația în cauză poate fi transferată într-un spațiu de distribuție, care este mai mare decât spațiul funcțional de bază, astfel că sunt disponibile mai multe metode flexibile pentru rezolvarea ecuației. De exemplu, funcțiile lui Green(d) și soluțiile fundamentale(d) sunt, de obicei, distribuții, și nu funcții propriu-zise, și pot fi apoi folosite pentru a găsi soluții ale ecuației cu condițiile la limită prescrise. Soluția găsită poate fi atunci, în unele cazuri, demonstrată a fi de fapt o funcție adevărată, și o soluție pentru ecuația originală (de exemplu, folosind teorema Lax–Milgram(d), o consecință a teoremei de reprezentare Riesz(d)).[76]
Analiza Fourier
[modificare | modificare sursă]Dezvoltarea unei funcții periodice într-o sumă de funcții trigonometrice formează o serie Fourier, o tehnică des utilizată în fizică și inginerie.[m][77] Spațiul vectorial este, de obicei, spațiul Hilbert L2(0, 2π), pentru care funcțiile sin mx și cos mx (cu m un număr întreg) formează o bază ortogonală.[78] Dezvoltarea în serie Fourier a unei funcții L2f este
Coeficienții am și bm se numesc coeficienții Fourier ai lui f, și sunt calculați prin formulele[79]
- ,
Din punct de vedere fizic, funcția este reprezentată ca o suprapunere de unde sinusoidale și coeficienții dau informații despre spectrul de frecvență(d) al funcției.[80] Se mai folosește frecvent și o formă cu numere complexe a seriei Fourier.[79] Formulele concrete de mai sus sunt consecințele unei mai generale dualități matematice numită dualitate Pontreaghin(d).[81] Aplicată grupului R, ea dă transformata Fourier clasică; o aplicație în fizică sunt rețelele reciproce(d), în care grupul de bază este un spațiu vectorial finit-dimensional real înzestrat cu elementele suplimentare ale unei rețele ce codifică pozițiile atomilor în cristale.[82]
Seriile Fourier sunt folosite și pentru a rezolva probleme ale valorilor limită(d) în ecuațiile cu derivate parțiale.[83] În 1822, Fourier a fost primul care a folosit această tehnică pentru a rezolva ecuația căldurii(d).[84] O versiune discretă a seriilor Fourier se poate folosi în aplicații de eșantionare în care valoarea funcției este cunoscută doar într-un număr finit de puncte echidistante. În acest caz, seria Fourier este finită și valoarea sa este peste tot egală cu punctele eșantionate.[85] Mulțimea coeficienților este cunoscută sub numele de transformata Fourier discretă(d) (DFT) a eșantionului dat. DFT este unul dintre instrumentele-cheie din prelucrarea semnalelor digitale(d), un domeniu printre ale cărui aplicații se numără radarul, codificarea sunetului(d), compresia imaginilor.[86] Formatul de imagine JPEG este o aplicație strâns legată de transformarea cosinus discretă.[87]
Transformata Fourier rapidă(d) este un algoritm rapid de calcul a transformatei Fourier discrete.[88] Este folosit nu numai pentru calculul coeficienților Fourier ci, folosind teorema de convoluție(d), și pentru calculul convoluției a două șiruri finite.[89] Acestea, la rândul lor, sunt aplicate în filtrele digitale(d)[90] și ca algoritm rapid de înmulțire(d) pentru polinoame și numere întregi mari (algoritmul Schönhage-Strassen(d)).[91][92]
Geometrie diferențială
[modificare | modificare sursă]
Planul tangent(d) la o suprafață într-un punct este, în mod natural, un spațiu vectorial a cărui origine este punctul de contact. Planul tangent este cea mai bună aproximare liniară, sau liniarizare(d) a unei suprafețe într-un punct.[n] Chiar și într-un spațiu euclidian tridimensional, nu există de obicei niciun mod natural de a prescrie o bază a planului tangent, și, deci, el este conceput ca un spațiu vectorial abstract, mai degrabă decât ca un spațiu cu coordonate reale. Spațiul tangent este generalizarea la varietăți diferențiabile(d) de dimensiuni superioare.[93]
Varietatile riemanniene(d) sunt varietăți ale căror spații tangente sunt dotate cu un produs scalar adecvat.[94] De aici rezultă tensorul Riemann (de curbură) care codifică toate curburile unei varietăți într-un singur obiect, care își găsește aplicații în teoria relativității generale, de exemplu, în care tensorul Einstein(d) descrie materia și conținutul de energie al spațiu-timpului.[95][96] Spațiul tangent la un grup Lie poate fi dat în mod natural ca structura unei algebre Lie și poate fi folosit pentru a clasifica grupuri Lie compacte(d).[97]
Generalizări
[modificare | modificare sursă]Fibrate vectoriale
[modificare | modificare sursă]
Un fibrat vectorial este o familie de spații vectoriale parametrizate continuu de un spațiu topologic X.[93] Mai precis, un fibrat vectorial peste X este un spațiu topologic E echipat cu o aplicație continuă
cu proprietatea că pentru orice x din X, fibra(d) π-1(x) este un spațiu vectorial. Cazul dim V = 1 se numește o fibră de drepte(d). Pentru orice spațiu vectorial V, proiecția X × V → X transformă produsul X × V într-un fibrat vectorial „trivial”(d). Fibratele vectoriale peste X sunt în mod necesar la nivel local(d) un produs între X și un spațiu vectorial fixat V: pentru fiecare x din X, există o vecinătate U a lui x astfel încât restricția lui π la π-1(U) este izomorfă[o] cu fibratul trivial U × V → U. În ciuda caracterului lor local și trivial, fibratele vectoriale pot (în funcție de forma spațiului-suport X) să fie „răsucite” la scară mare (de exemplu, fibratul nu trebuie să fie global izomorf cu fibratul trivial X × V). De exemplu, fâșia lui Möbius poate fi văzută ca un fibrat vectorial de drepte peste cercul S1 (identificând intervale deschide pe dreapta reală). Cu toate acestea, este diferit de cilindrul S1 × R, deoarece acesta din urmă este orientabil(d), în timp ce fâșia lui Möbius, nu.[98]
Proprietățile anumitor fibrate vectoriale oferă informații despre spațiul topologic suport al lor. De exemplu, fibratul tangent(d) constă din mulțimea spațiilor tangente(d) parametrizată de punctele unei varietăți derivabile. Fibratul tangent la cercul S1 la nivel global este izomorf cu S1 × R, deoarece nu există câmp vectorial global nenul pe S1.[p] În contrast, conform teoremei bilei păroase(d), nu există niciun câmp vectorial (tangent) pe 2-sfera S2, care să fie peste tot nenul.[99] K-teoria(d) studiază clasele de izomorfism ale tuturor fibratelor vectoriale peste un spațiu topologic.[100] În plus față de perspectivele topologice și geometrice mai profunde, conceptul are consecințe pur algebrice, cum ar fi clasificarea algebrelor cu diviziune reale și de dimensiuni finite: R, C, cuaternionii H și octonionii O.
Fibratul cotangent(d) al unei varietăți diferențiabile constă, în fiecare punct al varietății, din dualul spațiului tangent, spațiul cotangent(d). Secțiunile(d) acelui fibrat sunt cunoscute sub numele de 1-formă diferențială(d).
Module
[modificare | modificare sursă]Modulele sunt pentru inele ce sunt spații vectoriale pentru corpuri: aceleași axiome, aplicate la un inel I în loc de un corp comutativ K, dau module.[101] Teoria modulelor, față de cea a spațiilor vectoriale, este complicată de prezența elementelor de inel care nu au element invers multiplicativ(d). De exemplu, modulele nu au neapărat baze, după cum demonstrează Z-modulul (de exemplu, grupul abelian) Z/2Z(d); acele module care au bază (între care se numără și spațiile vectoriale) sunt cunoscute sub numele de module libere(d). Cu toate acestea, un spațiu vectorial poate fi compact definit ca un modul(d) peste un inel care este și corp, elementele lui fiind denumite vectori. Unii autori folosesc termenul de spațiu vectorial cu sensul de modul peste un inel cu operație de diviziune.[102] Interpretarea algebro-geometrică a inelelor comutative prin intermediul spectrului(d) permite dezvoltarea de concepte cum ar fi module local libere(d), omologul algebric al fibratelor vectoriale.
Spații afine și proiective
[modificare | modificare sursă]
Ca definiție aproximativă, spațiile afine sunt spații vectoriale ale căror origini nu sunt specificate.[103] Mai precis, un spațiu afin este o mulțime cu o acțiune de spațiu vectorial liber tranzitivă(d). În special, un spațiu vectorial este un spațiu afin peste sine, prin aplicația
- V × V → V, (v, a) ↦ a + v.
Dacă W este un spațiu vectorial, atunci un subspațiu afin este o submulțime a lui G obținută prin translatarea unui subspatiu liniar V cu un vector x ∈ W fixat; acest spațiu este notat cu x + V și este format din toți vectorii de forma x + v pentru v ∈ V. Un exemplu important este spațiul soluțiilor unui sistem de ecuații liniare neomogene
- Ax = b
generalizând cazul omogen b = 0 de mai sus.[104] Spațiul soluțiilor este subspațiul afin x + V , unde x este o soluție particulară a ecuației, și V este spațiul de soluții ale ecuației omogene (nucleul lui A).
Mulțimea subspațiilor monodimensionale ale unui spațiu vectorial finit-dimensional V este cunoscută ca spațiu proiectiv; acesta poate fi folosit pentru a formaliza ideea dreptelor paralele care se intersectează la infinit.[105] Grassmannienii(d) și varietățile de steaguri(d) generalizează acest lucru prin parametrizarea subspațiilor vectoriale de dimensiune fixă k și, respectiv, a steagurilor subspațiilor.
Note de completare
[modificare | modificare sursă]- ^ Mai ales în fizică, este obișnuită notarea vectorilor cu o săgeată deasupra: .
- ^ Această axiomă și următoarea se referă la două operațiuni diferite: înmulțirea cu un scalar: bv; și operațiunea de înmulțire din cadrul corpului: ab.
- ^ Unii autori (cum ar fi Brown 1991) restrâng atenția la corpurile R sau C, dar mare parte din teorie este neschimbată pentru orice corp arbitrar.
- ^ De exemplu, funcțiile indicator ale intervalelor (care sunt în număr infinit) sunt liniar independente.
- ^ Este de regulă cazul când un spațiu vectorial este considerat și ca spațiu afin.
- ^ Unii autori (cum ar fi Roman 2005. ) aleg să înceapă cu această relație de echivalență și să calculeze forma concretă a lui V/W din aceasta.
- ^ Această cerință face ca topologia să dea naștere unei structuri uniforme, Bourbaki 1989, ch.
- ^ Inegalitatea triunghiului pentru |−|p este dată de inegalitatea Minkowski.
- ^ Multe funcții din L2 de măsură Lebesgue, fiind nemărginite, nu pot fi integrate cu integrala Riemann clasică.
- ^ Pentru p ≠2, Lp(Ω) nu este spațiu Hilbert.
- ^ O bază a unui spațiu Hilbert nu este același lucru ca baza în sensul algebrei liniare de mai sus.
- ^ Vezi teoria reprezentării și reprezentarea grupurilor.
- ^ Deși seria Fourier este periodică, tehnica se poate aplica oricărei funcții L2 pe un interval considerând funcția ca fiind periodică în afara intervalului.
- ^ Adică (BSE-3 2001) planul care trece prin punctul de contact P astfel încât distanța de la un punct P1 la suprafața planului este infinitezimal de mică prin comparație cu distanța de la P1 la P la limită când P1 se apropie de P pe suprafață.
- ^ Adică există un homeomorfism de la π−1(U) la V × U care se restrânge la izomorfisme liniare între fibre.
- ^ Un fibrat de drepte, cum ar fi fibratul tangent la S1 este trivial dacă și numai dacă există o secțiune care nu dispare nicăieri, vezi Husemoller 1994, Corollary 8.3.
Note bibliografice
[modificare | modificare sursă]- ^ Roman 2005, ch. 1, p. 27
- ^ van der Waerden 1993, Ch. 19
- ^ Bourbaki 1998, §II.1.1.
- ^ Bourbaki 1969, ch. "Algèbre linéaire et algèbre multilinéaire", pp. 78–91
- ^ Bolzano 1804
- ^ Möbius 1827
- ^ Crowe, Michel J. (1994), A History of Vector Analysis: The Evolution of the Idea of a Vectorial System, Dover, p. 11 and 16, ISBN 0-486-67910-1
- ^ Hamilton 1853
- ^ Grassmann 2000
- ^ Peano 1888, ch. IX
- ^ Banach 1922
- ^ Dorier 1995, Moore 1995
- ^ Lang 1987, ch. I.1
- ^ Lang 2002, ch. V.1
- ^ de exemplu, Lang 1993, ch. XII.3., p. 335
- ^ Lang 1987, ch. IX.1
- ^ Lang 1987, ch. VI.3.
- ^ Roman 2005, Theorem 1.9, p. 43
- ^ Blass 1984
- ^ Halpern 1966, pp. 670–673
- ^ Artin 1991, Theorem 3.3.13
- ^ Braun 1993, Th. 3.4.5, p. 291
- ^ Stewart 1975, Proposition 4.3, p. 52
- ^ Stewart 1975, Theorem 6.5, p. 74
- ^ Roman 2005, ch. 2, p. 45
- ^ Lang 1987, ch. IV.4, Corollary, p. 106
- ^ Lang 1987, Example IV.2.6
- ^ Lang 1987, ch. VI.6
- ^ Halmos 1974, p. 28, Ex. 9
- ^ Lang 1987, Theorem IV.2.1, p. 95
- ^ Roman 2005, Th. 2.5 and 2.6, p. 49
- ^ Lang 1987, ch. V.1
- ^ Lang 1987, ch. V.3., Corollary, p. 106
- ^ Lang 1987, Theorem VII.9.8, p. 198
- ^ Roman 2005, ch. 8, p. 135–156
- ^ Lang 1987, ch. IX.4
- ^ Roman 2005, ch. 8, p. 140.
- ^ Roman 2005, ch. 1, p. 29
- ^ Roman 2005, ch. 1, p. 35
- ^ Roman 2005, ch. 3, p. 64
- ^ Lang 1987, ch. IV.3.
- ^ Roman 2005, ch. 2, p. 48
- ^ Mac Lane 1998
- ^ Roman 2005, ch. 1, pp. 31–32
- ^ Lang 2002, ch. XVI.1
- ^ Roman 2005, Th. 14.3.
- ^ Schaefer & Wolff 1999, pp. 204–205
- ^ Bourbaki 2004, ch. 2, p. 48
- ^ Roman 2005, ch. 9
- ^ Naber 2003, ch. 1.2
- ^ Treves 1967
- ^ Bourbaki 1987
- ^ Kreyszig 1989, §4.11-5
- ^ Kreyszig 1989, §1.5-5
- ^ Choquet 1966, Proposition III.7.2
- ^ Treves 1967, p. 34–36
- ^ Lang 1983, Cor. 4.1.2, p. 69
- ^ Treves 1967, ch. 11
- ^ Treves 1967, Theorem 11.2, p. 102
- ^ Evans 1998, ch. 5
- ^ Treves 1967, ch. 12
- ^ Dennery 1996, p.190
- ^ Lang 1993, Th. XIII.6, p. 349
- ^ Lang 1993, Th. III.1.1
- ^ Choquet 1966, Lemma III.16.11
- ^ Kreyszig 1999, Chapter 11
- ^ Griffiths 1995, Chapter 1
- ^ Lang 1993, ch. XVII.3
- ^ Lang 2002, ch. III.1, p. 121
- ^ Eisenbud 1995, ch. 1.6
- ^ Varadarajan 1974
- ^ Lang 2002, ch. XVI.7
- ^ Lang 2002, ch. XVI.8
- ^ Luenberger 1997, §7.13
- ^ Lang 1993, Ch. XI.1
- ^ Evans 1998, Th. 6.2.1
- ^ Folland 1992, p. 349 ff
- ^ Gasquet & Witomski 1999, p. 150
- ^ a b Gasquet & Witomski 1999, §4.5
- ^ Gasquet & Witomski 1999, p. 57
- ^ Loomis 1953, Ch. VII
- ^ Ashcroft & Mermin 1976, Ch. 5
- ^ Kreyszig 1988, p. 667
- ^ Fourier 1822
- ^ Gasquet & Witomski 1999, p. 67
- ^ Ifeachor & Jervis 2002, pp. 3–4, 11
- ^ Wallace Feb 1992
- ^ Ifeachor & Jervis 2002, p. 132
- ^ Gasquet & Witomski 1999, §10.2
- ^ Ifeachor & Jervis 2002, pp. 307–310
- ^ Gasquet & Witomski 1999, §10.3
- ^ Schönhage & Strassen 1971
- ^ a b Spivak 1999, ch. 3
- ^ Jost 2005.
- ^ Misner, Thorne & Wheeler 1973, ch. 1.8.7, p. 222 and ch. 2.13.5, p. 325
- ^ Jost 2005, ch. 3.1
- ^ Varadarajan 1974, ch. 4.3, Theorem 4.3.27
- ^ Kreyszig 1991, §34, p. 108
- ^ Eisenberg & Guy 1979
- ^ Atiyah 1989
- ^ Artin 1991, ch. 12
- ^ Grillet, Pierre Antoine.
- ^ Meyer 2000, Example 5.13.5, p. 436
- ^ Meyer 2000, Exercise 5.13.15–17, p. 442
- ^ Coxeter 1987
Bibliografie
[modificare | modificare sursă]Algebră
[modificare | modificare sursă]- Artin, Michael (), Algebra, Prentice Hall(d), ISBN 978-0-89871-510-1
- Blass, Andreas (), „Existence of bases implies the axiom of choice”, Axiomatic set theory (Boulder, Colorado, 1983), Contemporary Mathematics, 31, Providence, R.I.: American Mathematical Society, pp. 31–33
- Brown, William A. (), Matrices and vector spaces, New York: M. Dekker, ISBN 978-0-8247-8419-5
- Lang, Serge (), Linear algebra, Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-96412-6
- Lang, Serge (), Algebra, Graduate Texts in Mathematics, 211 (ed. Revised third), New York: Springer-Verlag, ISBN 978-0-387-95385-4, MR 1878556
- Mac Lane, Saunders (), Algebra (ed. 3rd), pp. 193–222, ISBN 0-8218-1646-2
- Meyer, Carl D. (), Matrix Analysis and Applied Linear Algebra, SIAM(d), ISBN 978-0-89871-454-8
- Roman, Steven (), Advanced Linear Algebra, Graduate Texts in Mathematics, 135 (ed. 2nd), Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-24766-3
- Spindler, Karlheinz (), Abstract Algebra with Applications: Volume 1: Vector spaces and groups, CRC, ISBN 978-0-8247-9144-5
- van der Waerden, Bartel Leendert (), Algebra (în germană) (ed. 9), Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-56799-8
Analiză
[modificare | modificare sursă]- Bourbaki, Nicolas (), Topological vector spaces, Elements of mathematics, Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-13627-9
- Bourbaki, Nicolas (), Integration I, Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-41129-1
- Braun, Martin (), Differential equations and their applications: an introduction to applied mathematics, Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-97894-9
- BSE-3 (), „Tangent plane”, În Hazewinkel, Michiel, Encyclopaedia of Mathematics, Kluwer Academic Publishers, ISBN 978-1556080104
- Choquet, Gustave (), Topology, Boston, MA: Academic Press(d)
- Dennery, Philippe; Krzywicki, Andre (), Mathematics for Physicists, Courier Dover Publications, ISBN 978-0-486-69193-0
- Dudley, Richard M. (), Real analysis and probability, The Wadsworth & Brooks/Cole Mathematics Series, Pacific Grove, CA: Wadsworth & Brooks/Cole Advanced Books & Software, ISBN 978-0-534-10050-6
- Dunham, William (), The Calculus Gallery, Princeton University Press, ISBN 978-0-691-09565-3
- Evans, Lawrence C. (), Partial differential equations, Providence, R.I.: American Mathematical Society, ISBN 978-0-8218-0772-9
- Folland, Gerald B. (), Fourier Analysis and Its Applications, Brooks-Cole, ISBN 978-0-534-17094-3
- Gasquet, Claude; Witomski, Patrick (), Fourier Analysis and Applications: Filtering, Numerical Computation, Wavelets, Texts in Applied Mathematics, New York: Springer-Verlag, ISBN 0-387-98485-2
- Ifeachor, Emmanuel C.; Jervis, Barrie W. (), Digital Signal Processing: A Practical Approach (ed. 2nd), Harlow, Essex, England: Prentice-Hall (publicat la ), ISBN 0-201-59619-9
- Krantz, Steven G. (), A Panorama of Harmonic Analysis, Carus Mathematical Monographs, Washington, DC: Mathematical Association of America, ISBN 0-88385-031-1
- Kreyszig, Erwin (), Advanced Engineering Mathematics (ed. 6th), New York: John Wiley & Sons, ISBN 0-471-85824-2
- Kreyszig, Erwin (), Introductory functional analysis with applications, Wiley Classics Library, New York: Wiley, ISBN 978-0-471-50459-7
- Lang, Serge (), Real analysis, Addison-Wesley(d), ISBN 978-0-201-14179-5
- Lang, Serge (), Real and functional analysis, Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-94001-4
- Loomis, Lynn H. (), An introduction to abstract harmonic analysis, Toronto-New York–London: D. Van Nostrand Company, Inc., pp. x+190
- Schaefer, Helmut H.; Wolff, M.P. (), Topological vector spaces (ed. 2nd), Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-98726-2
- Treves, François (), Topological vector spaces, distributions and kernels, Boston, MA: Academic Press(d)
Referințe istorice
[modificare | modificare sursă]- Banach, Stefan (), „Sur les opérations dans les ensembles abstraits et leur application aux équations intégrales” [Despre operațiunile din cadrul mulțimilor abstracte și aplicațiile lor în ecuații integrale] (PDF), Fundamenta Mathematicae(d) (în franceză), 3, ISSN 0016-2736
- Bolzano, Bernard (), Betrachtungen über einige Gegenstände der Elementargeometrie [Considerațiuni asupra unor aspecte ale geometriei elementare] (în germană)
- Bourbaki, Nicolas (), Éléments d'histoire des mathématiques [Elemente de istoria matematicii] (în franceză), Paris: Hermann
- Dorier, Jean-Luc (), „A general outline of the genesis of vector space theory”, Historia Mathematica(d), 22 (3): 227–261, doi:10.1006/hmat.1995.1024
- Fourier, Jean Baptiste Joseph (), Théorie analytique de la chaleur (în franceză), Chez Firmin Didot, père et fils
- Grassmann, Hermann (), Die Lineale Ausdehnungslehre - Ein neuer Zweig der Mathematik (în germană), O. Wigand, retipărit: Hermann Grassmann. Translated by Lloyd C. Kannenberg. (), Kannenberg, L.C., ed., Extension Theory, Providence, R.I.: American Mathematical Society, ISBN 978-0-8218-2031-5
- Hamilton, William Rowan (), Lectures on Quaternions, Royal Irish Academy
- Möbius, August Ferdinand (), Der Barycentrische Calcul : ein neues Hülfsmittel zur analytischen Behandlung der Geometrie [Analiză baricentrică: un nou instrument de tratare analitică a geometriei] (în germană), arhivat din original la , accesat în
- Moore, Gregory H. (), „The axiomatization of linear algebra: 1875–1940”, Historia Mathematica(d), 22 (3): 262–303, doi:10.1006/hmat.1995.1025
- Peano, Giuseppe (), Calcolo Geometrico secondo l'Ausdehnungslehre di H. Grassmann preceduto dalle Operazioni della Logica Deduttiva (în italiană), Torino
Alte referințe
[modificare | modificare sursă]- Ashcroft, Neil; Mermin, N. David (), Solid State Physics, Toronto: Thomson Learning, ISBN 978-0-03-083993-1
- Atiyah, Michael Francis (), K-theory, Advanced Book Classics (ed. 2nd), Addison-Wesley(d), ISBN 978-0-201-09394-0
- Bourbaki, Nicolas (), Elements of Mathematics : Algebra I Chapters 1-3, Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-64243-5
- Bourbaki, Nicolas (), General Topology. Chapters 1-4, Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-64241-1
- Coxeter, Harold Scott MacDonald (), Projective Geometry (ed. 2nd), Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-96532-1
- Eisenberg, Murray; Guy, Robert (), „A proof of the hairy ball theorem”, The American Mathematical Monthly(d), Mathematical Association of America, 86 (7): 572–574, doi:10.2307/2320587
- Eisenbud, David (), Commutative algebra, Graduate Texts in Mathematics, 150, Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-94269-8
- Goldrei, Derek (), Classic Set Theory: A guided independent study (ed. 1st), London: Chapman and Hall(d), ISBN 0-412-60610-0
- Griffiths, David J. (), Introduction to Quantum Mechanics, Upper Saddle River, NJ: Prentice Hall(d), ISBN 0-13-124405-1
- Halmos, Paul R. (), Finite-dimensional vector spaces, Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-90093-3
- Halpern, James D. (), „Bases in Vector Spaces and the Axiom of Choice”, Proceedings of the American Mathematical Society(d), American Mathematical Society, 17 (3): 670–673, doi:10.2307/2035388
- Husemoller, Dale (), Fibre Bundles (ed. 3rd), Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-94087-8
- Jost, Jürgen (), Riemannian Geometry and Geometric Analysis (ed. 4th), Berlin, New York: Springer Science+Business Media, ISBN 978-3-540-25907-7
- Kreyszig, Erwin (), Differential geometry, New York: Dover Publications(d), pp. xiv+352, ISBN 978-0-486-66721-8
- Kreyszig, Erwin (), Advanced Engineering Mathematics (ed. 8th), New York: Wiley, ISBN 0-471-15496-2
- Luenberger, David (), Optimization by vector space methods, New York: Wiley, ISBN 978-0-471-18117-0
- Mac Lane, Saunders (), Categories for the Working Mathematician(d) (ed. 2nd), Berlin, New York: Springer Science+Business Media, ISBN 978-0-387-98403-2
- Misner, Charles W.; Thorne, Kip; Wheeler, John Archibald (), Gravitation(d), W. H. Freeman, ISBN 978-0-7167-0344-0
- Naber, Gregory L. (), The geometry of Minkowski spacetime, New York: Dover Publications(d), ISBN 978-0-486-43235-9
- Schönhage, A.; Strassen, Volker (), „Schnelle Multiplikation großer Zahlen (Fast multiplication of big numbers)” (PDF), Computing (în germană), 7: 281–292, doi:10.1007/bf02242355, ISSN 0010-485X[nefuncțională]
- Spivak, Michael (), A Comprehensive Introduction to Differential Geometry (Volume Two), Houston, TX: Publish or Perish
- Stewart, Ian (), Galois Theory, Chapman and Hall(d) Mathematics Series, Londra: Chapman and Hall(d), ISBN 0-412-10800-3
- Varadarajan, V. S. (), Lie groups, Lie algebras, and their representations, Prentice Hall(d), ISBN 978-0-13-535732-3
- Wallace, G.K. (), „The JPEG still picture compression standard”, IEEE Transactions on Consumer Electronics, 38 (1): xviii–xxxiv, doi:10.1109/30.125072, ISSN 0098-3063
- Weibel, Charles A. (). An introduction to homological algebra. Cambridge Studies in Advanced Mathematics. 38. Cambridge University Press. ISBN 978-0-521-55987-4. MR 1269324. OCLC 36131259.
Legături externe
[modificare | modificare sursă]- en Hazewinkel, Michiel, ed. (), „Vector space”, Encyclopaedia of Mathematics, Kluwer Academic Publishers, ISBN 978-1556080104
- en O prelegere despre concepte fundamentale referitoare la spații vectoriale (ținută la MIT)
- en Simulator grafic pentru conceptele de generare, liniar-dependență, bază și dimensiune
| ||||||||