Kinematički par
Kinematički par čine dva međusobno povezana člana mehanizma. Članovi su međusobno povezani vezama kojima se ujedno omogućuje određeno relativno gibanje jednoga člana u odnosu na drugi. Kinematički parovi razlikuju se već prema vrsti veze, odnosno prema tomu koliko im ona dopušta stupnjeva slobode gibanja (nevezano, to jest slobodno tijelo u prostoru ima ukupno 6 stupnjeva slobode gibanja: 3 komponente translacije i 3 rotacije). Najmanji broj stupnjeva slobode imaju rotacijski, translacijski i vijčani kinematički parovi (jedan), a najveći ih broj (pet) ima kinematički par što ga čine dva člana u slobodnom dodiru u prostoru.[1]



Kinematički par čine dva susjedna dijela u neprekidnom dodiru. Spoj koji dijelovima osigurava neprekidan dodir jest zglob. Kinematički parovi mogu imati od jednoga do pet stupnjeva slobode relativnog kretanja. Broj stupnjeva slobode gibanja svakoga dijela u kinematičkom paru smanjuje se s brojem veza. Kinematičke parove možemo razlikovati na 4 načina: prema obliku mjesta dodira, prema načinu ostvarivanja neprekidnoga dodira, prema mogućnostima relativnoga gibanja u prostoru i prema svojstvu obratnosti gibanja.
Prema obliku mjesta dodira kinematički parovi su:
- niži ili
- viši.
Prema načinu ostvarivanja neprekidnoga dodira kinematički parovi su:
- kinematički zatvoreni ili
- dinamički zatvoreni.
Prema mogućnostima relativnoga gibanja u prostoru kinematički parovi su:
- ravni ili
- prostorni.
Prema svojstvu obratnosti gibanja kinematički parovi su:
- kinematički parovi sa svojstvom obratnosti ili
- kinematički parovi bez svojstva obratnosti (reverzibilnosti).
Niži su kinematički parovi oni kod kojih se dijelovi dodiruju na površini, a viši su oni kojima je dodirno mjesto točka ili crta.
Kinematičko zatvaranje u kinematičkome se paru postiže konstrukcijskom izvedbom (geometrijskim oblikom) dijelova para. Dinamičko se zatvaranje postiže djelovanjem neke sile na dijelove kinematičkog para (sila može biti sila teža, sila opruge ili sila tromosti).
Ravni kinematički parovi jesu oni kojima se dijelovi gibaju u istoj ravnini. To znači da staze (trajektorije) svih točaka na obama dijelovima leže u međusobno usporednim ravninama (komplanarno gibanje).
Prostorni kinematički parovi jesu oni kod kojih se dijelovi mogu gibati u dvjema ili trima prostornim ravninama, a staza svake točke je uvijek je na istoj prostornoj plohi.
Da bi se odredilo ima li kinematički par svojstvo obratnosti ili ga nema, zamišlja se da jedan dio apsolutno miruje, a drugi se apsolutno giba. Na taj se način relativna gibanja svode na apsolutna gibanja pokretnoga dijela.
Kinematički parovi sa svojstvom obratnosti (reverzibilni) jesu oni kojima podudarne (koincidentne ili susjedne) točke na dijelovima imaju istovjetne putanje gibanja. To znači da se gibaju na isti način i kada dijelovi zamijene uloge, odnosno da je svejedno koji je dio pomičan, to jest nepomičan. U te kinematičke parove ubrajaju se: zglob za vrtnju, zglob za pravocrtno gibanje, cilindrični zglob, vijčani (helikoidni) zglob i kuglasti (sferni) zglob.
Kinematički parovi bez svojstva obratnosti (ireverzibilni) nemaju istu putanju gibanja podudarnih točaka na dijelovima kad oni zamijene uloge. To znači da nije svejedno koji je dio pomičan, to jest nepomičan. U takve se kinematičke zglobove ubrajaju: tarni (frikcijski) zglob, zupčasti zglob, krivuljni (grebenasti) zglob i zglob s gipkom vezom.
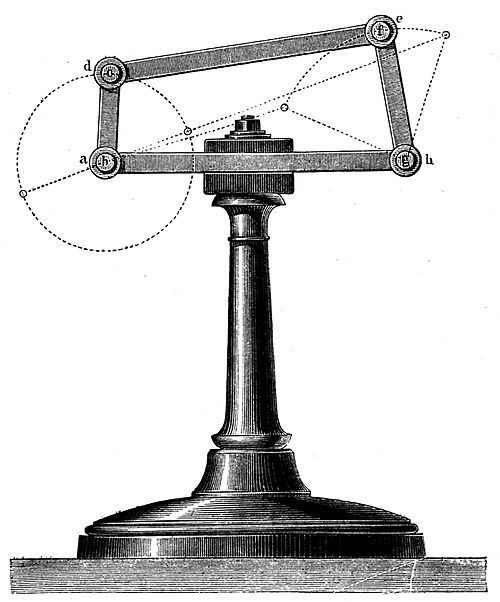
Gibanje dijelova mehanizama mora biti potpuno određeno, pa mehanizmi moraju biti zatvoreni kinematički lanci. Zatvoreni kinematički lanac jest onaj kojemu svaki dio ulazi u sastav najmanje dvaju zglobova. Mehanizmi su prisilni kinematički lanci jer imaju postolje i potreban broj pogonskih dijelova.
Stupanj pokretljivosti mehanizma jest broj sloboda gibanja pokretnih dijelova prema nepomičnom, to jest postolju. On ovisi o broju dijelova u sastavu mehanizma i o broju i vrsti zglobova. Stupanj pokretljivosti određuje se gradbenom (strukturnom) jednadžbom u kojoj je broj dijelova označen s n, a broj zglobova određenoga reda s pk (na primjer ako su mehanizmu tri zgloba reda k = 1 i dva zgloba reda k = 2, tada je p1 = 3 i p2 = 2). Red kinematičkoga zgloba ili zgloba k određen je brojem neovisnih gibanja koje ima jedan dio u odnosu prema drugome.
Gradbena (strukturna) jednadžba za prostorne mehanizme glasi:
a za ravninske mehanizme:
Pregled reda zglobova prema broju stupnjeva slobode gibanja:[3]
| Red zgloba | Moguća relativna gibanja dijelova u zglobu | ||
| k = 1 | R | T | |
| k = 2 | RR | RT | |
| k = 3 | RRR | RRT | RTT |
| k = 4 | RRRT | RRTT | |
| k = 5 | RRRTT | ||
- ↑ mehanizam, [1], "Hrvatska enciklopedija", Leksikografski zavod Miroslav Krleža, www.enciklopedija.hr, 2015.
- ↑ http://en.wikisource.org/wiki/The_Kinematics_of_Machinery Kinematics of Machinery, 1876.
- ↑ Anđelka Ređep: Finomehanika, udžbenik za srednje strukovne škole, "Školska knjiga", Zagreb, 2009.